3 mc_camout, 4 mc_gearin, Mc_camout – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 150: Mc_gearin, L-force | plc designer - softmotion
L-force | PLC Designer - SoftMotion
The SM_PLCopen.lib library
POUs for the synchronised motion control (multi-axis)
150
L
DMS 5.2 EN 03/2011 TD17
6.3.3
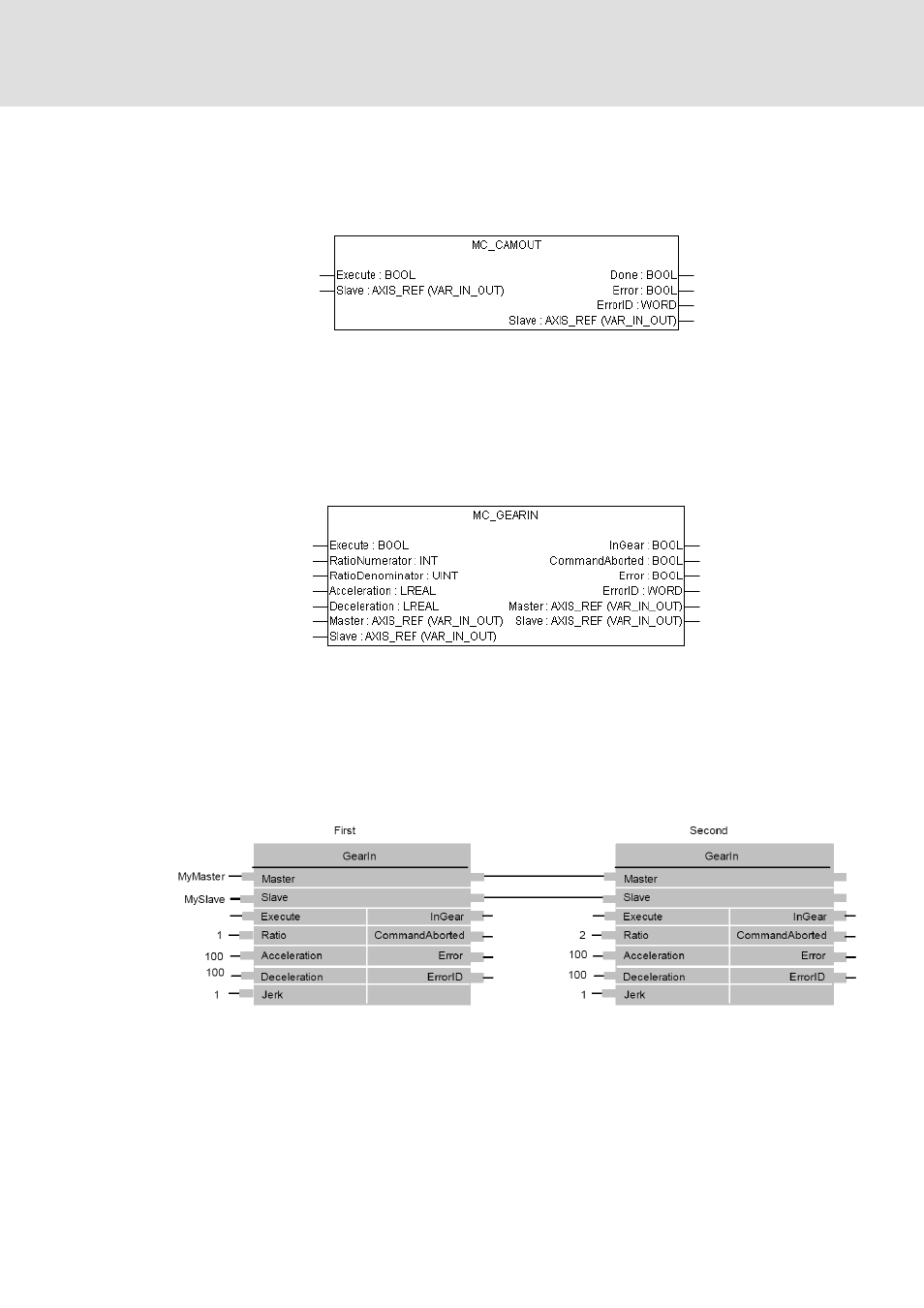
MC_CamOut
This program organisation unit from SM_PLCopen.lib disengages the slave drive from the
master and continues to drive the slave at the current velocity.
6.3.4
MC_GearIn
This program organisation unit from SM_PLCopen.lib couples the slave axis to the master
axis. The velocity of the slave axis is, thus, f times that of the master axis. The value of
factor f results from the quotient of the RatioNumerator and RatioDenominator input
parameters.
The program organisation unit uses the Acceleration and Deceleration values to accelerate
and decelerate the slave axis until its velocity has the required ratio to that of the master
axis. Once this has been achieved, the velocity of the slave axis is derived from the master
axis.
If the bRegulatorOn variable of the master axis is set to TRUE, the velocity setpoints will be
used, otherwise the actual values will be used.
Example: Gear timing diagram