4 two-jointed scara systems, 1 smc_trafo_scara2, Two-jointed scara systems – Lenze PLC Designer PLC-Designer (R2-x) SoftMotion User Manual
Page 231
DMS 5.2 EN 03/2011 TD17
L
231
L-force | PLC Designer - SoftMotion
The SM_Trafo.lib library
Transformation function blocks
9.1.4
Two-jointed Scara systems
9.1.4.1
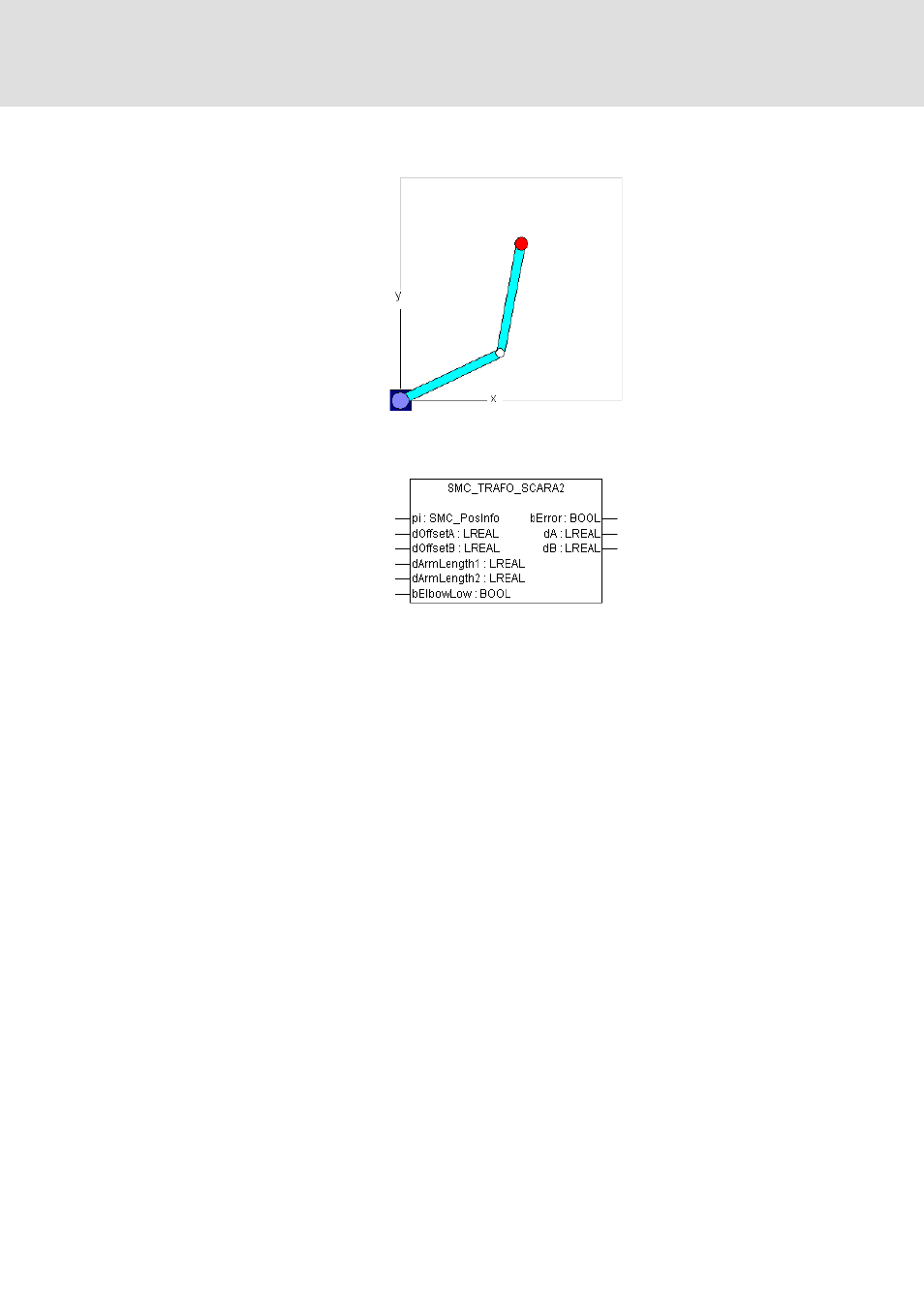
SMC_TRAFO_Scara2
Inputs (VAR_IN)
pi: SMC_PosInfo
Target position vector. Output of the interpolator
dOffsetA, dOffsetB: LREAL
Offset for A and B axis
dArmLength1, dArmLength2: LREAL
Length of the first and second arm
bElbowLow: BOOL
Elbow down (TRUE) or up (FALSE)
Outputs (VAR_OUT)
bError BOOL
TRUE: Impermissible values
da, db: LREAL
Axis position of A or B axis
See also other documents in the category Lenze Software:
- 9400 (954 pages)
- p300 (195 pages)
- I/O system 1000 (44 pages)
- 3241C (32 pages)
- PC-based automation (60 pages)
- DSD (496 pages)
- PLC Designer R3-x (159 pages)
- Engineer v2.21 (312 pages)
- PLC Designer ApplicationTemplate (PLC Designer R3-x) (177 pages)
- PLC Designer Migration PLC Designer (R2-x)-PLC Designer (R3-x) (30 pages)
- PLC Designer PLC Designer (R2-x) (844 pages)
- PLC Designer PLC Designer (R3-1) (1170 pages)
- PLC Designer PLC Designer (R2-x) CANopen for Runtime Systems (56 pages)
- ApplicationTemplate PackML (PLC Designer R3-x) (99 pages)
- EASY Starter-ApplicationLoader (13 pages)
- ASY Starter Lenze OPC UA-Server (9 pages)
- 8400 motec (518 pages)
- 8400 TopLine (1760 pages)
- i700 (338 pages)
- 8400 HighLine (1576 pages)
- 8400 StateLine (1030 pages)
- 8400 BaseLine C (342 pages)
- 8400 BaseLine D (260 pages)
- E70ACxS Application Sample i700 (PLC Designer v3) (33 pages)
- E94AYFLF Digital frequency module (54 pages)
- E94ARNE Regenerative power supply (360 pages)
- E94AxHE Servo Drives 9400 HighLine (Firmware 01-37) (679 pages)
- E94AxHE Technology Application Actuating drive - Speed (38 pages)
- E94AxHE Technology Application Actuating drive - Torque (34 pages)
- E94AxHE Technology Application CiA402 Device profile (232 pages)
- E94AxHE Technology Application Electronic gearbox (80 pages)
- E94AxHE Technology Application Positioning sequence control (78 pages)
- E94AxHE Technology Application Synchronism (80 pages)
- E94AxHE Technology Application Table positioning (50 pages)
- Loader L-force Loader (45 pages)
- L-force I/O System 1000 (99 pages)
- Function library LenzeIO1000Drv (64 pages)
- ETC Motion Control (428 pages)
- Function library CANopenSdoDrv (26 pages)
- Function library LenzeConversionBox (14 pages)
- ACU UPS for Industrial PCs (18 pages)
- PLC Designer V2.x (336 pages)
- IPC Operating System Windows CE Thin Client (26 pages)
- IPC Operating System Windows Embedded Standard 2009 (14 pages)