NORD Drivesystems BU0300 User Manual
Page 95
7.8 Control terminals
BU 0300 EN
Subject to technical alterations
95
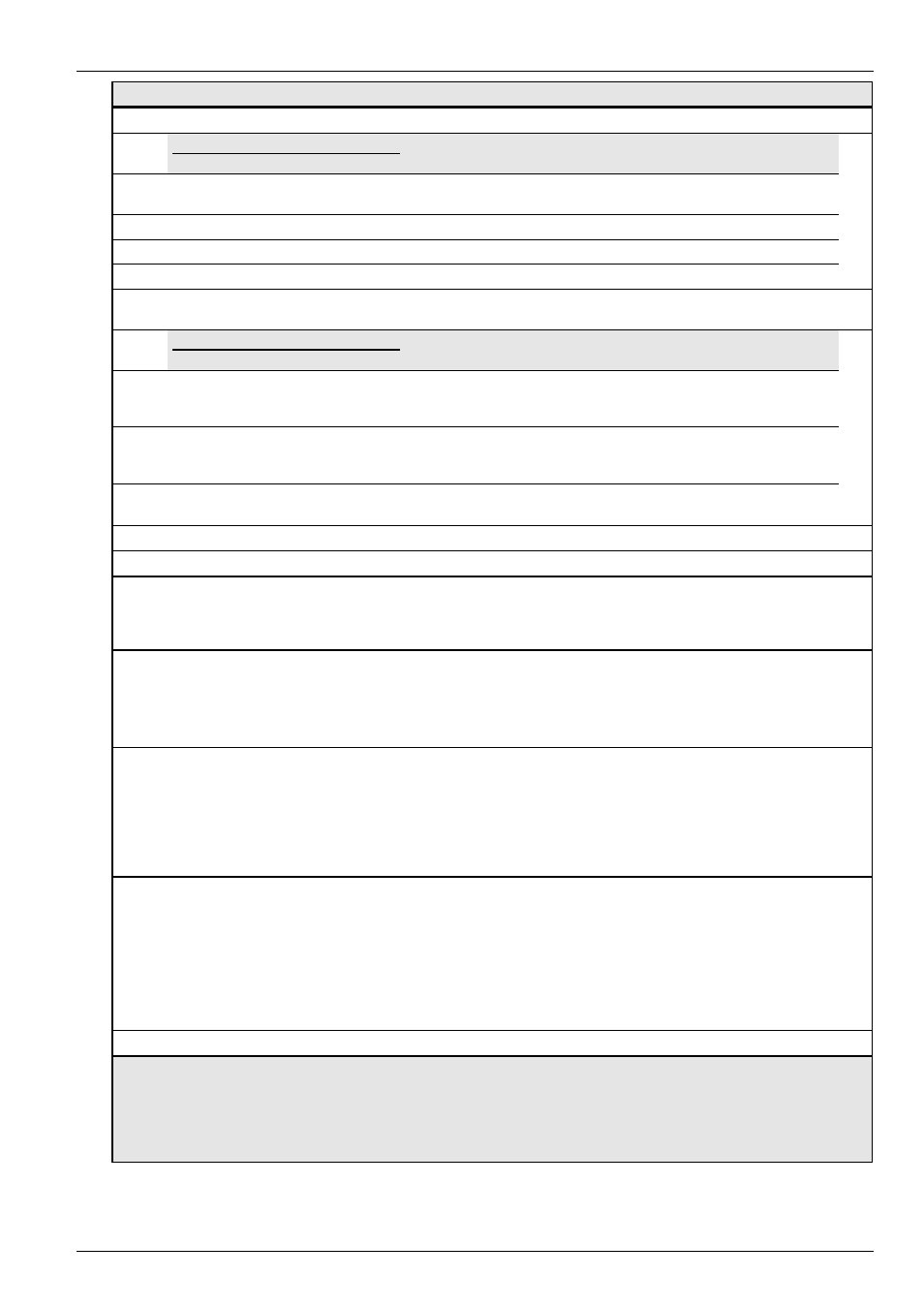
Value
Function
Description
Signal
22
... 25 reserved
Analog functions for digital inputs
can be programmed for every input, they have a resolution of 7 bit
and can be used for simple applications.
26
Torque current limit
Adjustable load limit, the output frequency is reduced when it
is reached. → P112
Analog
27
Actual frequency PID
Possible PID actual value feedback
Analog
28
Frequency addition
Addition to other frequency setpoint values
Analog
29
Frequency subtraction
Subtraction from other frequency setpoint values
Analog
30
Inhibit PID
Switching the PID controller / process controller function on
and off (high = ON)
High
Analog functions for digital inputs
can be programmed for every input, they have a resolution of 7 bit
and can be used for simple applications.
40
Current value process controller *
Activates the process controller, analog input 1 is connected
to the actual value sensor (compensator, air can, flow volume
meter, etc.). The mode (0-10 V or 0/4-20 mA) is set in P401.
Analog
41
Nom. Value Process controller *
Like function 14, however the setpoint is specified (e.g. by a
potentiometer). The actual value must be specified using
another input.
Analog
42
Add. Process control *
Adds an adjustable additional setpoint after the process
controller
Analog
43
… 46 reserved
47
Motorpoti frequency +
When an enable is present, the frequency setpoint can be
increased by pressing the key. The acceleration time P102 is
relevant for increases using the key. Limitation is
implemented with the maximum frequency P105.
High
48
Motorpoti frequency -
When an enable is present, the frequency setpoint can be
decreased by pressing the key. The deceleration time P103 is
relevant for decreases using the key. Limitation is
implemented with the minimum frequency P104.
Reversing is not possible in this way.
High
71
Motorpoti frequency +
with automatic saving
When an enable is present, the frequency setpoint can be
increased by pressing the key. The acceleration time P102 is
relevant for increases using the key. Limitation is
implemented with the maximum frequency P105.
One second after the frequency change, the held frequency
value is automatically saved in parameter P113 (jog
frequency).
High
72
Motorpoti frequency -
with automatic saving
When an enable is present, the frequency setpoint can be
decreased by pressing the key. The deceleration time P103 is
relevant for decreases using the key. Limitation is
implemented with the minimum frequency P104.
Reversing is not possible in this way.
One second after the frequency change, the held frequency
value is automatically saved in parameter P113 (jog
frequency).
High
1
If neither of the digital inputs is programmed for left or right enable, then the actuation of a fixed frequency or jog frequency will
enable the frequency inverter. The rotation field direction depends on the sign of the setpoint.
2
Also effective for Bus control (RS232, RS485, CANbus, CANopen, DeviceNet, Profibus, InterBus, AS-Interface)
*) For further details about the process controller, see Chap. 12.3