Common specifications – Yaskawa Matrix Converter User Manual
Page 366
Standard MxC Specifications
9-
3
Common Specifications
The following specifications apply to MxCs in both 200 V and 400 V classes.
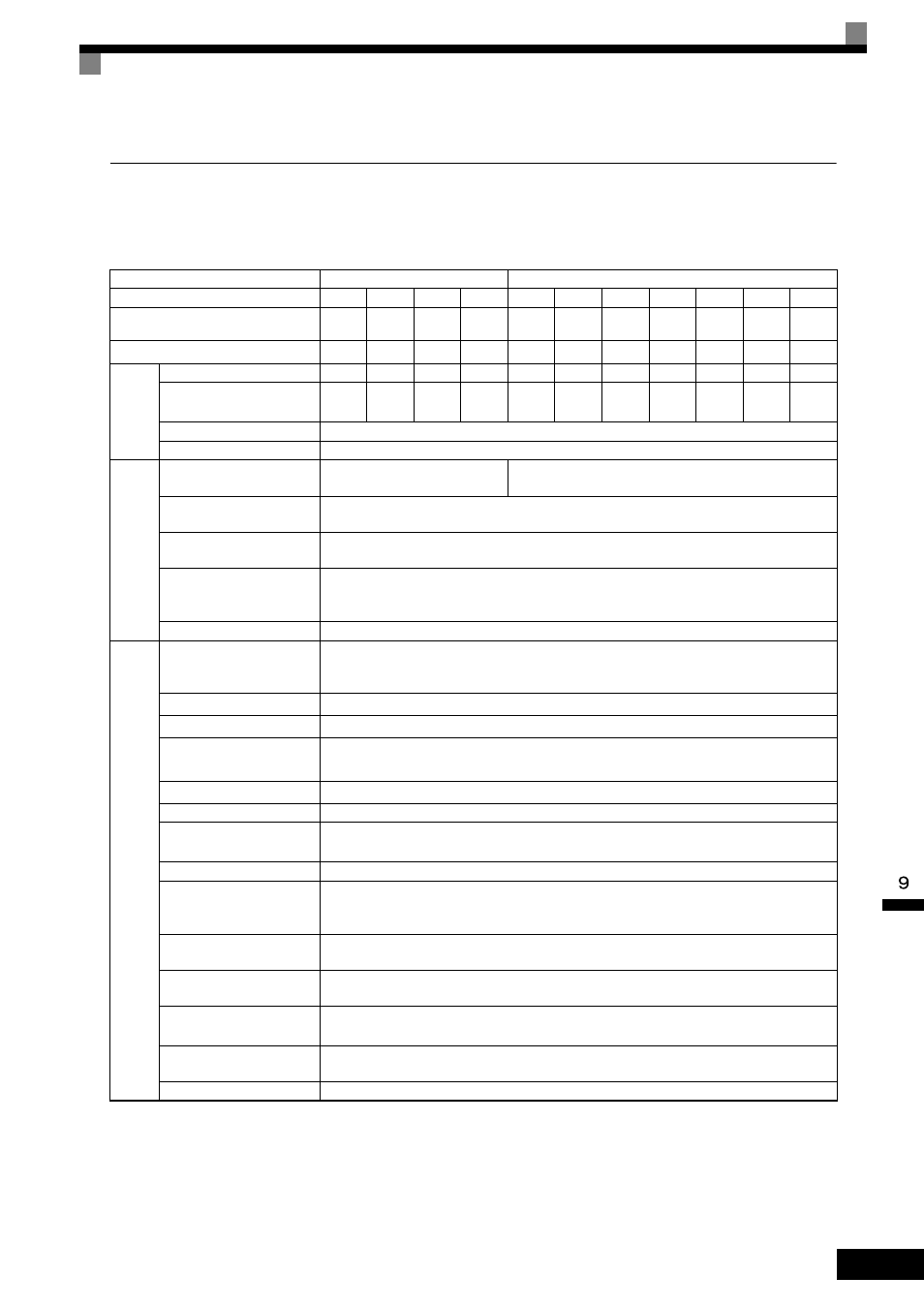
Table 9.3 Common Specifications
Voltage Class (V)
200
400
Model: CIMR-ACAA
25P5
2011
2022
2045 45P5
4011
4022
4045
4075
4110
4160
Maximum motor capacity (kW)
*1
5.5
11
22
45
5.5
11
22
45
75
110
160
Rated input current
*2
A
26
47
91
174
14
26
49
92
157
228
287
Rated
output
Output capacity (kVA)
9
17
33
63
10
19
36
67
114
166
209
Rated output current
(A)
*3
27
49
96
183
15
27
52
97
165
240
302
Max output voltage
Ratio of input voltage (Input voltage
× 0.95)
Max output frequency
Applicable for 120 Hz depending on parameter settings.
Power
Rated voltage and rated
frequency
3-phase: 200 V, 208 V, and 220
V, 50 Hz or 60 Hz
3-phase: 380 V, 400 V, 415 V, 440 V, 460 V, and 480 V,
50 Hz or 60 Hz
Allowable voltage
fluctuation
+10% to -15%
Allowable frequency
fluctuation
± 3%, fluctuation ratio: 1 Hz/100 ms or less
Allowable power
voltage imbalance
between phases
Within 2%
Input power factor
0.95 or more (When the rated load is applied.)
Control method
Sine wave pulse-width modulation (PWM)
Use parameter settings to select from three methods: Flux Vector Control, Open Loop Vec-
tor Control, or V/f Control.
Torque characteristics
150%/0 Hz with Flux Vector Control
*4
Speed control range
1:1000 with Flux Vector Control
*4
Speed control
accuracy
*5
± 0.2% with Open Loop Vector Control at -10°C to +40°C,
*4
± 0.05% with Flux Vector Control at 25°C ± 10°C
*4
Speed control response
30 Hz with Flux Vector Control
*4
Torque limits
For vector control only. Use parameter settings to change 4 quadrant control.
Torque accuracy
± 10% (Flux vector control: 25 °C ±10 °C with a vector motor,
carrier frequency of 4kHz)
*4
Frequency control range
0.01 Hz to 120 Hz
Frequency accuracy
(temperature
characteristics)
Digital references:
± 0.01% (-10 °C to +40 °C),
Analog references:
± 0.1% (25 °C ±10 °C)
Frequency setting
resolution
Digital references: 0.01 Hz
Analog references: 0.03 Hz/ 60 Hz (11 bit signed)
Output frequency
resolution
0.001 Hz
Overload capacity and
maximum current
*6
150% of rated output current per one minute (for carrier frequency of 4 kHz).
Acceleration/
Deceleration time
0.00 s to 6000.0 s
Select from four combinations of independent acceleration and deceleration settings.
Braking torque
Same overload capacity for motoring and regeneration
Control char
acter
istic
s