Pid control methods, Pid input methods – Yaskawa Matrix Converter User Manual
Page 262
Individual Functions
6-
97
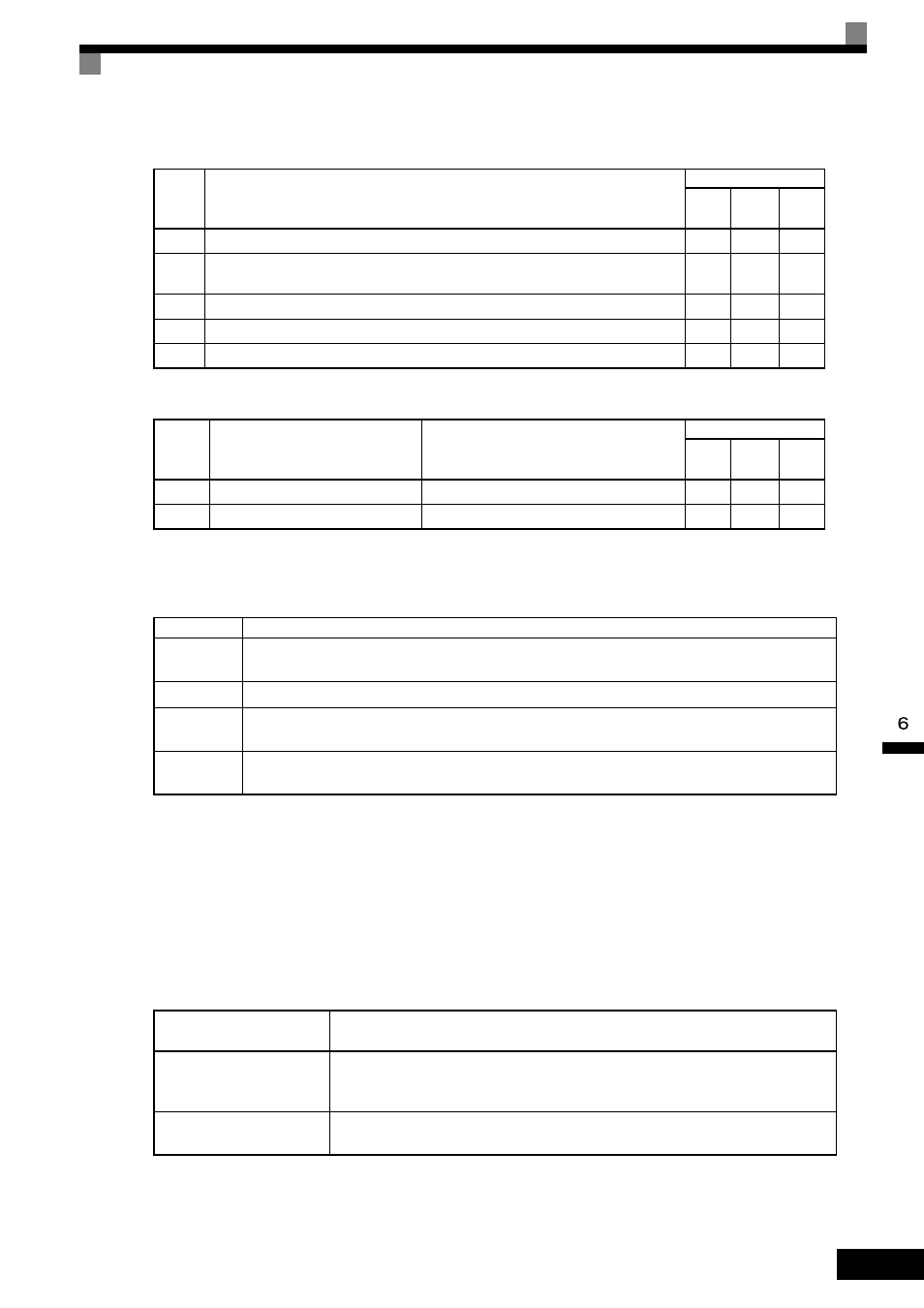
Multi-Function Digital Inputs (H1-01 to H1-10)
Multi-Function Analog Input (H3-05, H3-09)
PID Control Methods
There are four PID control methods. Select the method by setting parameter b5-01.
PID Input Methods
Enable PID control using parameter b5-01, and set the PID target value and PID feedback value.
PID Target Value Input Methods
Select the PID control target value input method according to the setting in b1-01 (Frequency Reference
Selection).
Normally, the frequency reference selected in b1-01 is the PID target value, but the PID target value can be
changed as shown in the following table.
Set
Value
Function
Control Methods
V/f
Open
Loop
Vector
Flux
Vector
19
PID control disable (ON: PID control disabled.)
Yes
Yes
Yes
30
PID control integral reset (reset when Reset Command is input or when stopped during PID
control)
Yes
Yes
Yes
31
PID control integral hold (ON: Hold)
Yes
Yes
Yes
34
PID soft starter
Yes
Yes
Yes
35
PID input characteristics switch
Yes
Yes
Yes
Set
Value
Function
Contents (100%)
Control Methods
V/f
Open
Loop
Vector
Flux
Vector
B
PID feedback
Maximum output frequency
Yes
Yes
Yes
C
PID target value
Maximum output frequency
Yes
Yes
Yes
Set Value
Control Method
1
PID output becomes the MxC output frequency, and D control is used in the difference between PID tar-
get value and feedback value.
2
PID output becomes the MxC output frequency, and D control is used in the PID feedback value.
3
PID output is added as compensation value of the MxC output frequency, and D control is used in the dif-
ference between PID target value and feedback value.
4
PID output is added as compensation value of the MxC output frequency, and D control is used in the
PID feedback value.
PID Target Input Method
Setting Conditions
Multi-Function Analog
Terminal A2 Input
Set H3-05 or H3-09 to C (PID target value). Also, be sure to set H6-01 (Terminal RP
Pulse Train Input Function Selection) to 1 (PID feedback value).
The negative inputs cannot be used for target values.
MEMOBUS register 0006H
Set MEMOBUS bit 1 in register address 000FH to 1 to be able to use register number
0006H as the PID target value.