Yaskawa Matrix Converter User Manual
Page 117
Parameter Tables
5-
17
* The setting range for accel/decel times depends on the setting of C1-10 (Accel/Decel Time Setting Units). If C1-10 is set to 0, the setting range is 0.00 to 600.00 (s).
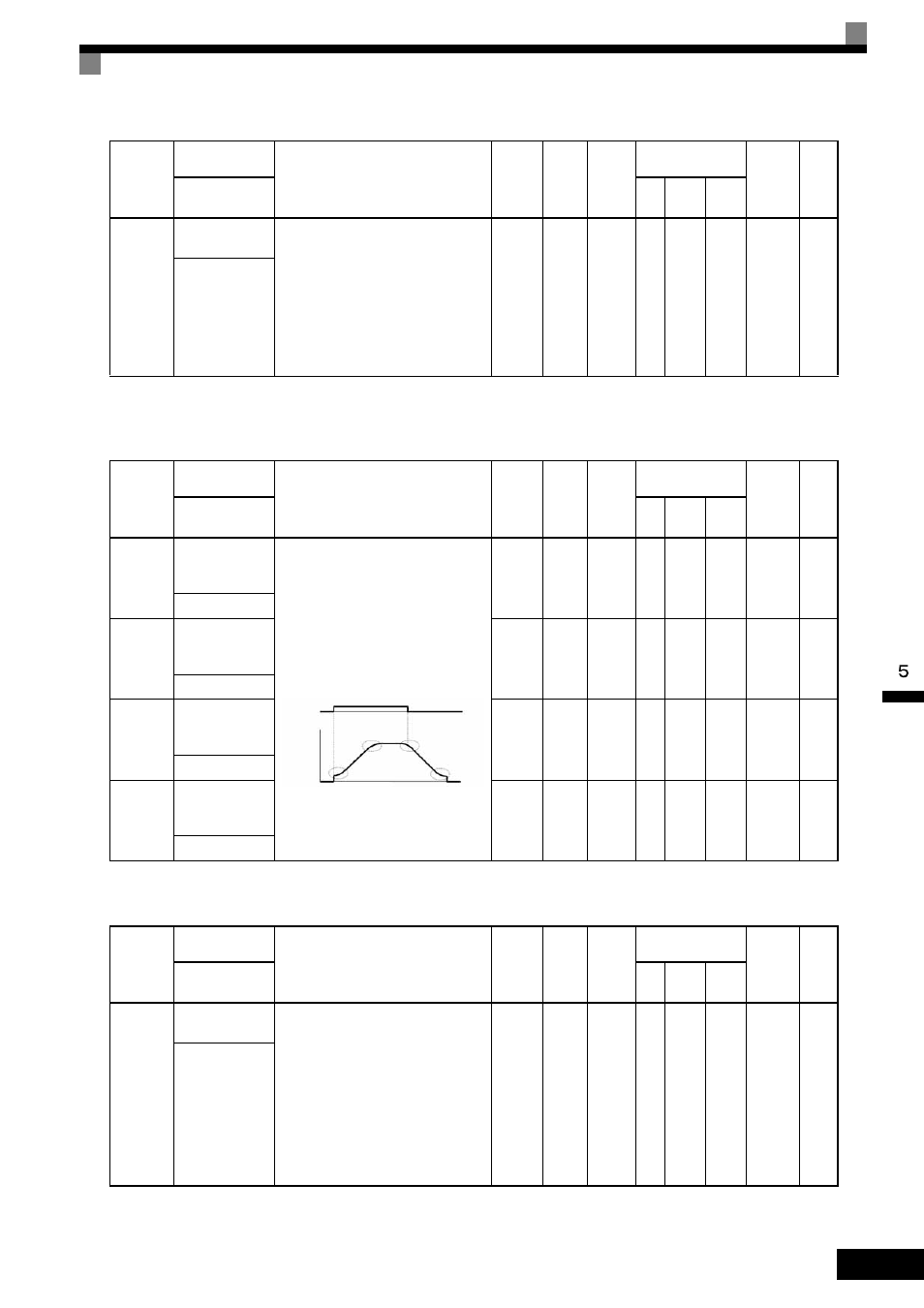
C2: S-Curve Acceleration/Deceleration
C3: Motor Slip Compensation
C1-11
Accel/Decel
Switch Frequency
Sets the frequency for automatic switch-
ing of accel/decel times.
Fout < C1-11: Accel/Decel Time 4
Fout
≥C1-11: Accel/Decel Time 1
Multi-function inputs “Multi-Acc/Dec 1”
and “Multi-Acc/Dec 2” have priority over
C1-11.
Note: With Multi-Function Input, Accel/
Decel Time 1 and 2 will take prece-
dence.
0.0 to
120.0
0.0 Hz
No
A
A
A
20AH
4-17
6-17
Acc/Dec SW Freq
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control
Methods
MEMO-
BUS
Register
Page
Display
V/f
Open
Loop
Vector
Flux
Vector
C2-01
S-Curve Charac-
teristic at Accel
Start
All sections of the S-curve characteristic
time are set in seconds units.
When the S-curve characteristic time is
set, the accel/decel times will increase by
only half of the S-curve characteristic
times at start and end.
0.00 to
2.50
0.20 s
No
A
A
A
20BH
4-17
6-18
SCrv Acc @ Start
C2-02
S-Curve Charac-
teristic at Accel
End
0.00 to
2.50
0.20 s
No
A
A
A
20CH
4-17
6-18
SCrv Acc @ End
C2-03
S-Curve Charac-
teristic at Decel
Start
0.00 to
2.50
0.20 s
No
A
A
A
20DH
4-17
6-18
SCrv Dec @ Start
C2-04
S-Curve Charac-
teristic at Decel
End
0.00 to
2.50
0.00 s
No
A
A
A
20EH
4-17
6-18
SCrv Dec @ End
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control
Methods
MEMO-
BUS
Register
Page
Display
V/f
Open
Loop
Vector
Flux
Vector
C3-01
Slip Compensa-
tion Gain
This parameter is used to increase motor
speed to account for motor slip by boost-
ing the output frequency. If the speed is
lower than the frequency reference,
increase C3-01. If the speed is higher
than the frequency reference, decrease
C3-01.
Note: Adjustment is not normally
required. When operating in Open
Loop Vector, this parameter works
as a function to set the proper
amount of gain.
0.0 to
2.5
1.0
*
Yes
A
A
A
20FH
4-15
6-32
Slip Comp Gain
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control
Methods
MEMO-
BUS
Register
Page
Display
V/f
Open
Loop
Vector
Flux
Vector
Run Command
Output frequency
Time
on
off
C2-02
C2-03
C2-04
C2-01