Yaskawa Matrix Converter User Manual
Page 140
5
-40
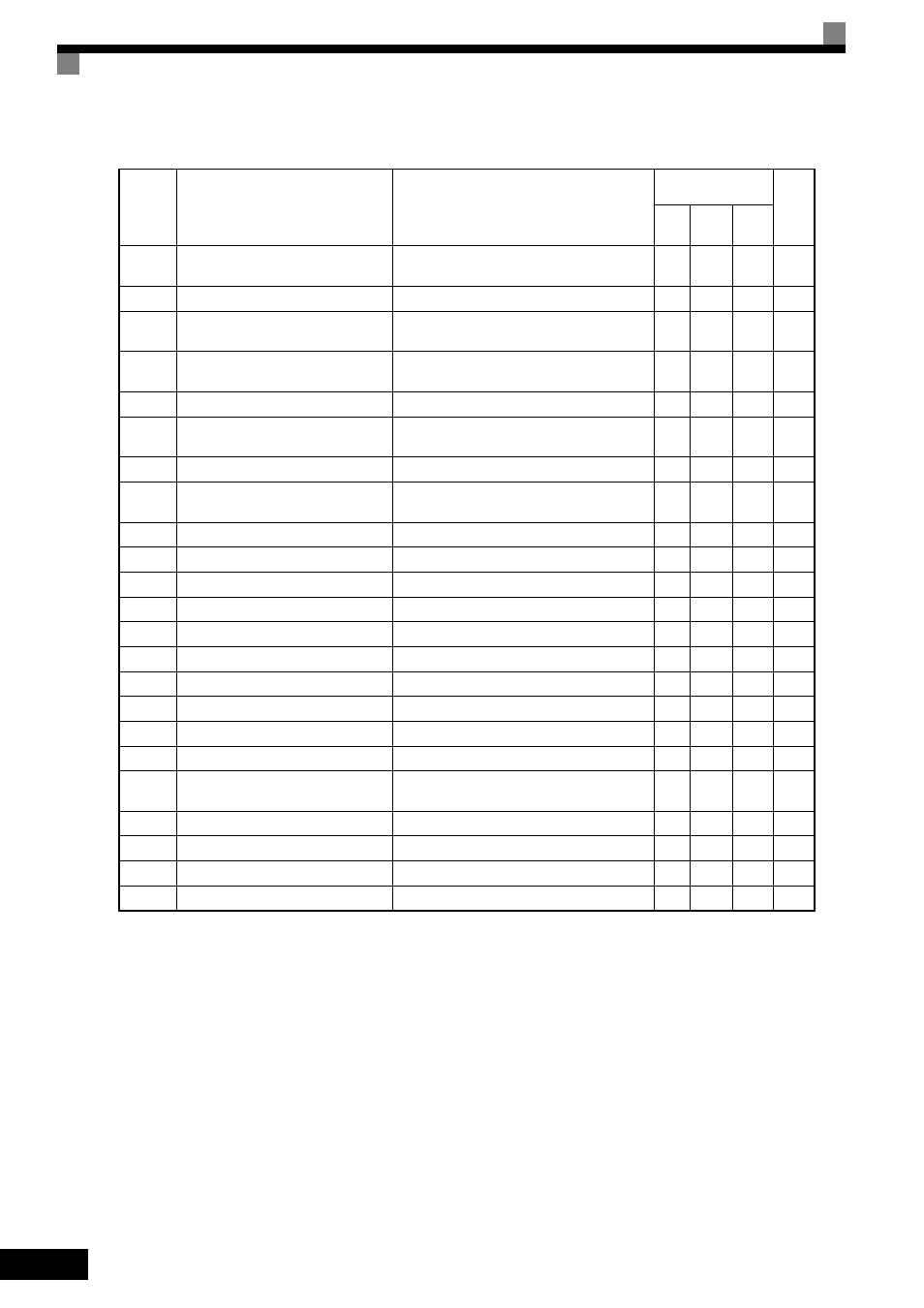
H3-05, H3-09 Settings
Set
Value
Function
Contents (100%)
Control
Methods
Page
V/f
Open
Loop
Vector
Flux
Vector
0
Add to terminal A1
Maximum output frequency
Yes
Yes
Yes
6-27
6-109
1
Frequency gain
Frequency Reference (voltage) Command value
Yes
Yes
Yes
6-26
2
Auxiliary Frequency Reference 1 (2nd
step analog)
Maximum output frequency
Yes
Yes
Yes
6-5
3
Auxiliary Frequency Reference 2 (3rd
step analog)
Maximum output frequency
Yes
Yes
Yes
6-5
4
Voltage bias
200 V (200 V class), 400 V (400 V class)
Yes
No
No
-
5
Accel/decel change (reduction coeffi-
cient)
Set acceleration and deceleration times (C1-01 to
C1-08)
Yes
Yes
Yes
6-17
6
DC injection braking current
MxC rated output current
Yes
Yes
No
6-16
7
Overtorque/undertorque detection level
Motor rated torque for vector control
MxC rated output current for V/f control
Yes
Yes
Yes
6-50
8
Stall prevention level during run
MxC rated output current
Yes
No
No
6-44
9
Frequency reference lower limit level
Maximum output frequency
Yes
Yes
Yes
6-31
A
Jump frequency
Maximum output frequency
Yes
Yes
Yes
6-29
B
PID feedback
Maximum output frequency
Yes
Yes
Yes
6-97
C
PID target value
Maximum output frequency
Yes
Yes
Yes
6-97
D
Frequency bias 2
Maximum output frequency
Yes
Yes
Yes
6-27
E
Motor temperature input
10 V = 100%
Yes
Yes
Yes
6-55
10
Positive torque limit
Motor rated torque
No
Yes
Yes
6-41
11
Negative torque limit
Motor rated torque
No
Yes
Yes
6-41
12
Regenerative torque limit
Motor rated torque
No
Yes
Yes
6-41
13
Torque reference/torque limit at speed
control
Motor rated torque
No
No
Yes
6-109
14
Torque compensation
Motor rated torque
No
No
Yes
6-109
15
Positive/negative torque limit
Motor rated torque
No
Yes
Yes
6-41
1F
Analog input not used.
-
Yes
Yes
Yes
6-6
16 to 1E Not used
-
-
-
-
-