Yaskawa Matrix Converter User Manual
Page 241
6
-76
Stopping the MxC by Notifying Programming Device Errors to the MxC
(External Fault Function)
The external fault function performs the error contact output, and stops the MxC operation if the MxC periph-
eral devices break down or an error occurs. The digital operator will display EFx (External fault [input termi-
nal Sx]). The x in EFx shows the terminal number of the terminal that input the external fault signal. For
example, if an external fault signal is input to terminal S3, EF3 will be displayed.
To use the external fault function, set one of the values 20 to 2F in one of the parameters H1-01 to H1-10 (Ter-
minal S3 to S12 Function Selection).
Select the value to be set in H1-01 to H1-10 from a combination of any of the following three conditions.
•
Signal input level from peripheral devices
•
External fault detection method
•
Operation during external fault detection
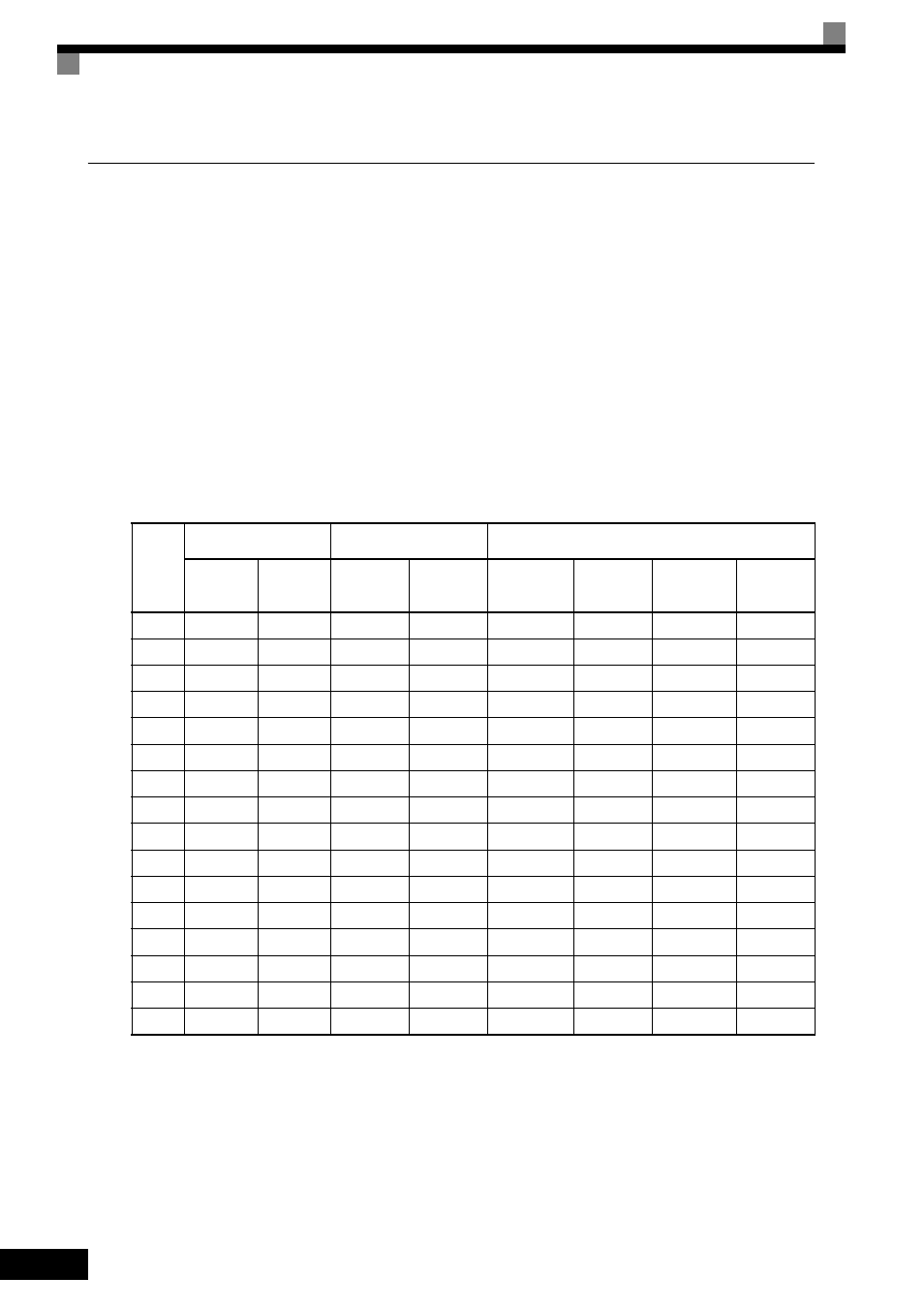
The following table shows the relationship between the combinations of conditions and the set value in H1-
.
Note: 1. Set the input level to detect errors using either signal on or signal off. (NO contact: External fault when on, NC contact: External fault when off).
2. Set the detection method to detect errors using either parameter detection or detection during run.
Parameter detection: Detects while power is supplied to the MxC.
Detection during run: Detects only during MxC operation.
Set
Value
Input Level
(See Note 1.)
Error Detection Method
(See Note 2.)
Operation During Error Detection
NO
Contact
NC
Contact
Parameter
Detection
Detection
during Run
Decelerate
to Stop
(Error)
Coast to
Stop
(Error)
Emergency
Stop (Error)
Continue
Operation
(Warning)
20
Yes
Yes
Yes
21
Yes
Yes
Yes
22
Yes
Yes
Yes
23
Yes
Yes
Yes
24
Yes
Yes
Yes
25
Yes
Yes
Yes
26
Yes
Yes
Yes
27
Yes
Yes
Yes
28
Yes
Yes
Yes
29
Yes
Yes
Yes
2A
Yes
Yes
Yes
2B
Yes
Yes
Yes
2C
Yes
Yes
Yes
2D
Yes
Yes
Yes
2E
Yes
Yes
Yes
2F
Yes
Yes
Yes