Yaskawa Matrix Converter User Manual
Page 151
Parameter Tables
5-
51
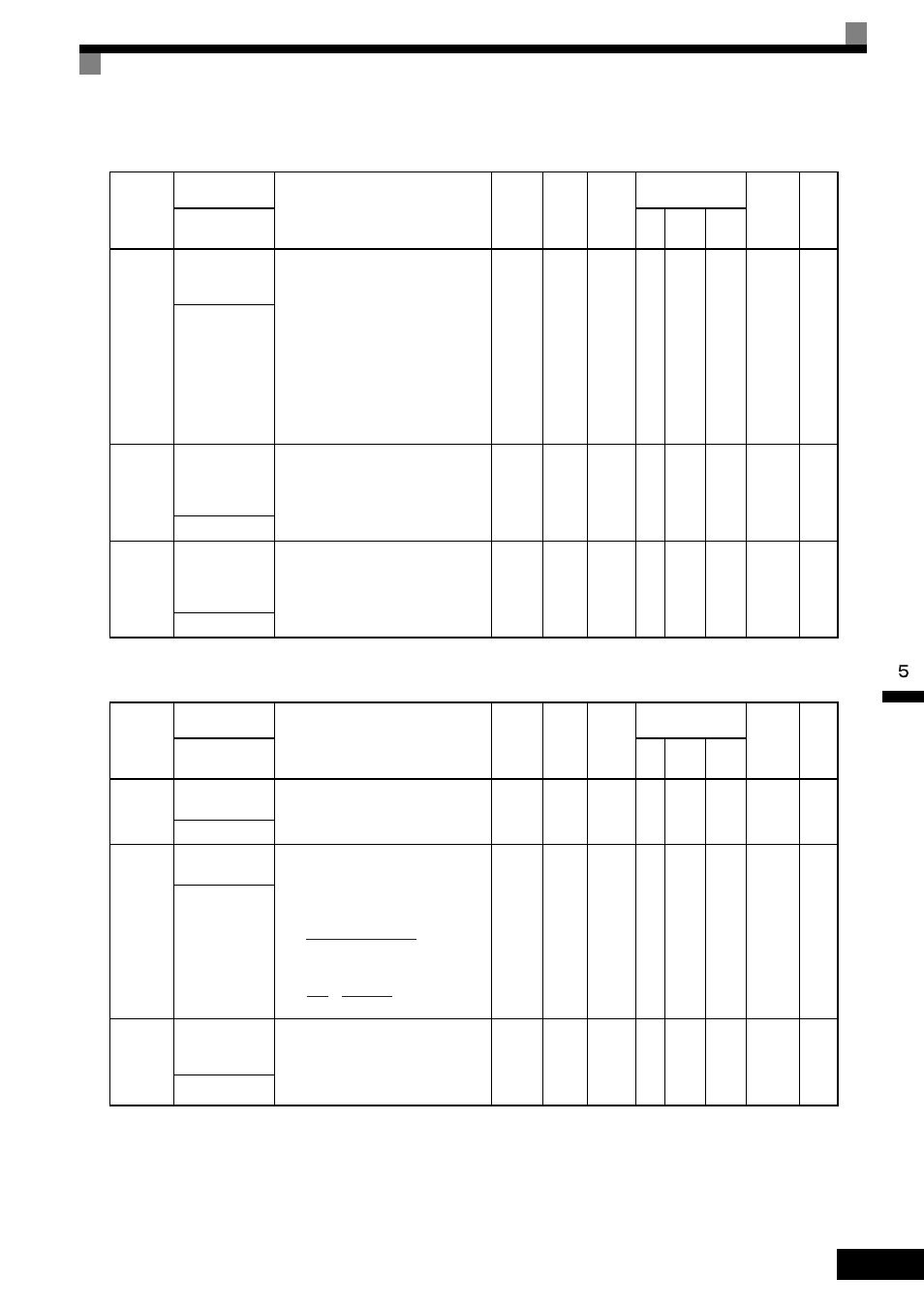
n2: Speed Feedback Protection Control Functions
n5: Feed Forward
* The default depends on the MxC capacity. The value for a 200 V class MxC of 5.5 kW is given.
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control
Methods
MEMO-
BUS
Register
Page
Display
V/f
Open
Loop
Vector
Flux
Vector
n2-01
Speed Feedback
Detection Con-
trol (AFR) Gain
Set the internal speed feedback detection
control gain using the multiplication
function.
Normally, there is no need to make this
setting.
Adjust this parameter as follows:
• If hunting occurs, increase the set
value.
• If response is low, decrease the set
value.
Adjust the setting by 0.05 at a time, while
checking the response.
0.00 to
10.00
1.00
No
No
A
No
584H
4-14
6-37
AFR Gain
n2-02
Speed Feedback
Detection Con-
trol (AFR) Time
Constant
Set the time constant to decide the rate of
change in the speed feedback detection
control.
0 to
2000
100
ms
No
No
A
No
585H
6-37
AFR Time
n2-03
Speed Feedback
Detection Con-
trol (AFR) Time
Constant 2
Increase the setting if overvoltage (OV)
failures occur at the completion of accel-
eration or when the load changes radi-
cally.
0 to
2000
750
ms
No
No
A
No
586H
6-37
AFR Time 2
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control
Methods
MEMO-
BUS
Register
Page
Display
V/f
Open
Loop
Vector
Flux
Vector
n5-01
Feed Forward
Control Selection
Selects the feed forward controls.
0: Disabled.
1: Enabled.
0 or 1
0
No
No
No
A
5B0H
4-17
6-120
Feedfoward Sel
n5-02
Motor Accelera-
tion Time
Sets the time required to accelerate the
motor at the rated torque (T100) to the
rated speed (Nr).
J: (GD
2
) / 4, P: Motor rated output
And
0.001 to
10.000
0.168
s
*
No
No
No
A
5B1H
4-17
6-120
Motor Accel Time
n5-03
Feed Forward
Control Ratio
Gain
Sets the proportional gain for feed for-
ward controls.
Response to the speed reference will
increase as the setting of n5-03 is
increased.
0.00 to
100.00
1.0
No
No
No
A
5B2H
4-17
6-120
Feedfoward Gain
2
π J[kgm
2
] Nr[min
-1
]
[sec]
ta =
60 T
100
[N
m]
T
100
=
60
× 10
3
[N m]
2
π
P[kW]
Nr[min
-1
]