Decelerate to stop – Yaskawa Matrix Converter User Manual
Page 177
6
-12
* 0 or 1 for Flux Vector Control.
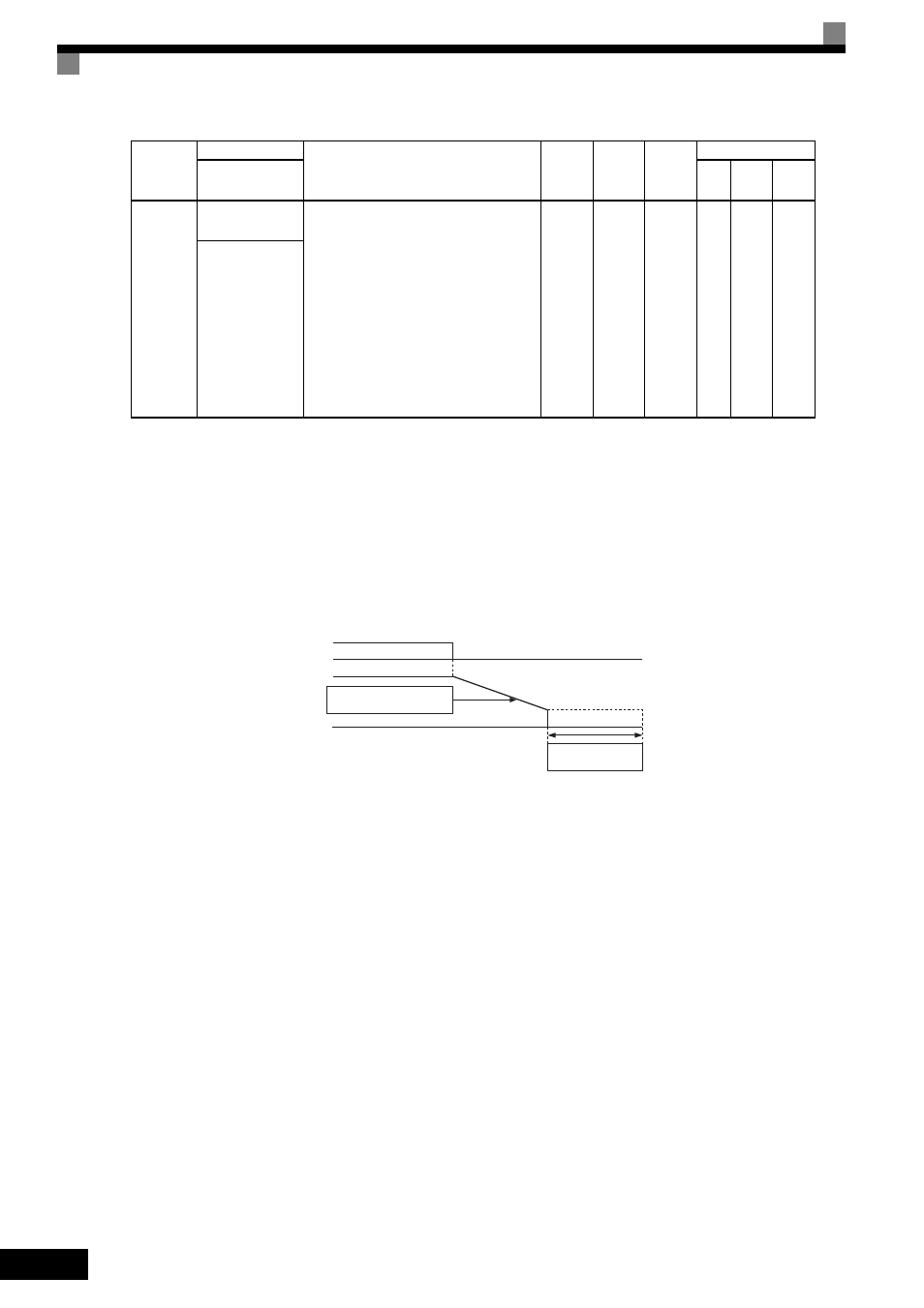
Decelerate to Stop
If the Stop Command is input (i.e., the Run Command is turned off) when b1-03 is set to 0, the motor deceler-
ates to a stop according to the deceleration time that has been set (default: C1-02 (Deceleration Time 1)).
If the output frequency when decelerating to stop falls below b2-01, DC Injection Braking will be applied
using the DC current set in b2-02 only for the time set in b2-04.
For deceleration time settings, refer to page 6-17, Setting Acceleration and Deceleration Times.
Fig 6.12 Decelerate to Stop
b2-04
DC Injection Brak-
ing Time at Stop
Sets the time length of DC injection braking
at stop in units of 0.01 seconds.
1: When b1-03 = 2, actual DC Injection time
is calculated as follows: (b2-04)
× 10 ×
(OutputFreq) / (E1-04)
2: When b1-03 = 0, this parameter deter-
mines the amount of time DC Injection is
applied to the motor at the end of the decel
ramp.
3: This should be set to a minimum of 0.50
seconds when using HSB. This will acti-
vate DC injection during the final portion
of HSB and help ensure that the motor
stops completely.
0.00
to
10.00
0.50 s
No
A
A
A
DCInj Time @Stop
Parameter
Number
Name
Description
Setting
Range
Default
Change
during
Run
Control Methods
Display
V/f
Open
Loop
Vector
Flux
Vector
Decelerates to stop at
deceleration time
Output frequency
Run command
on
off
DC injection brake time
when stopping (b2-04)
DC injection brake