Interrupts, 1 interrupt overview, Ystem – Maxim Integrated High-Speed Microcontroller User Manual
Page 105: Isable
High-Speed Microcontroller User’s Guide
Rev: 062210
105 of 176
9.
INTERRUPTS
The high-speed microcontroller family utilizes a three-priority interrupt system. The number of interrupts
varies according to the specific device. Each source has an independent priority bit, flag, interrupt vector,
and enable. In addition, interrupts can be globally enabled (or disabled). The system is compatible with
the original 8051 family. All of the original interrupts are available.
Several new sources have been added with new associated control and status bits, and new interrupt
vectors. Note that the interrupt vector table can extend from 0000h to 006Bh, so existing code may
require a relocation of the start address to avoid a conflict with the upper end of the vector table. A
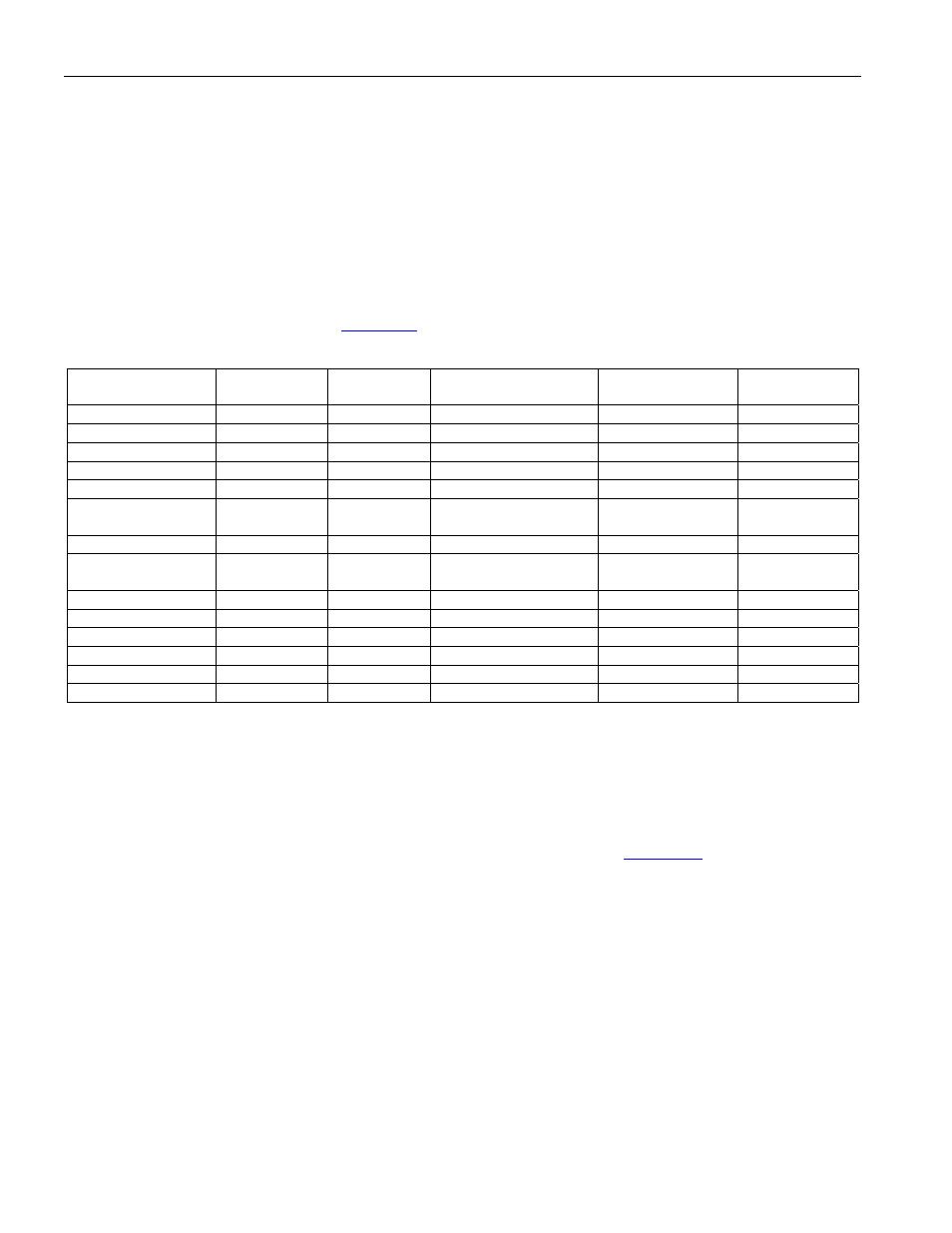
summary of all interrupts appears in
Table 9-A. Interrupt Summary
INTERRUPT
INTERRUPT
VECTOR
NATURAL
PRIORITY
FLAG ENABLE
PRIORITY
CONTROL
Power-Fail Indicator
33h
0
PFI (WDCON.4) EPFI
(WDCON.5)
N/A
External Interrupt 0
03h
1
IE0 (TCON.1)**
EX0 (IE.0)
PX0 (IP.0)
Timer 0 Overflow
0Bh
2
TF0 (TCON.5)*
ET0 (IE.1)
PT0 (IP.1)
External Interrupt 1
13h
3
IE1 (TCON.3)**
EX1 (IE.2)
PX1 (IP.2)
Timer 1 Overflow
1Bh
4
TF1 (TCON.7)*
ET1 (IE.3)
PT1 (IP.3)
Serial Port 0
23h
5
RI_0 (SCON0.0),
TI_0 (SCON0.1)
ES0 (IE.4)
PS0 (IP.4)
Timer 2 Overflow
2Bh
6
TF2 (T2CON.7)
ET2 (IE.5)
PT2 (IP.5)
Serial Port 1
3Bh
7
RI_1 (SCON1.0),
TI_1 (SCON1.1)
ES1 (IE.6)
PS1 (IP.6)
External Interrupt 2
43h
8
IE2 (EXIF.4)
EX2 (EIE.0)
PX2 (EIP.0)
External Interrupt 3
4Bh
9
IE3 (EXIF.5)
EX3 (EIE.1)
PX3 (EIP.1)
External Interrupt 4
53h
10
IE4 (EXIF.6)
EX4 (EIE.2)
PX4 (EIP.2)
External Interrupt 5
5Bh
11
IE5 (EXIF.7)
EX5 (EIE.3)
PX5 (EIP.3)
Watchdog Interrupt
63h
12
WDIF (WDCON.3)
EWDI (EIE.4)
PWDI (EIP.4)
Real-Time Clock
6Bh
13
RTCIF (RTCC.1)
ERTCI (EIE.5)
PRTCI (EIP.5)
Note: Unless marked, these flags must be cleared manually by software.
*Cleared automatically by hardware when the service routine is vectored to.
**If edge-triggered, cleared automatically by hardware when the service routine is vectored to. If level-triggered, flag follows the state of the pin.
9.1 Interrupt Overview
An interrupt allows the software to react to unscheduled or asynchronous events. When an interrupt
occurs, the CPU is expected to “service” the interrupt. This service takes the form of an interrupt service
routine (ISR). The ISR resides at a predetermined address as shown in
. When the interrupt
occurs, the CPU will vector to the appropriate location. It will run the code found at this location, staying
in an interrupt service state until done with the ISR. Once an ISR has begun, it can be interrupted only by
a higher priority interrupt. The ISR is terminated by a return from interrupt instruction (RETI). When an
RETI is performed, the processor will return to the instruction that would have been next when the
interrupt occurred.
Each interrupt source has an associated vector. This is the address to which the CPU will jump when the
interrupt occurs. When the interrupt condition occurs, the processor will also indicate this by setting a flag
bit. This bit is set regardless of whether the interrupt is enabled or not. That is, the flag responds to the
condition, not the interrupt. Most flags must be cleared manually by software. However, IE0 and IE1 are
cleared automatically by hardware when the service routine is vectored to if the interrupt was edge
triggered. In level-triggered mode, the flag follows the state of the pin. Flags TF0 and TF1 are always
cleared automatically when the service routine is vectored to. Refer to the individual bit descriptions for