3 force mode (only in binary profile) – Festo Электроцилиндр User Manual
Page 79
5
Commissioning
Festo – GDCP-CMMO-ST-EA-SY-EN – 1301a – English
79
5.6.2
Speed mode (binary profile only)
Command records of type “V” (= Velocity) or “VSL” (= Velocity Stroke limit) are used to reach and
maintain a certain speed.
The actual speed is specified at the start of the speed record, e.g. by the previous command record.
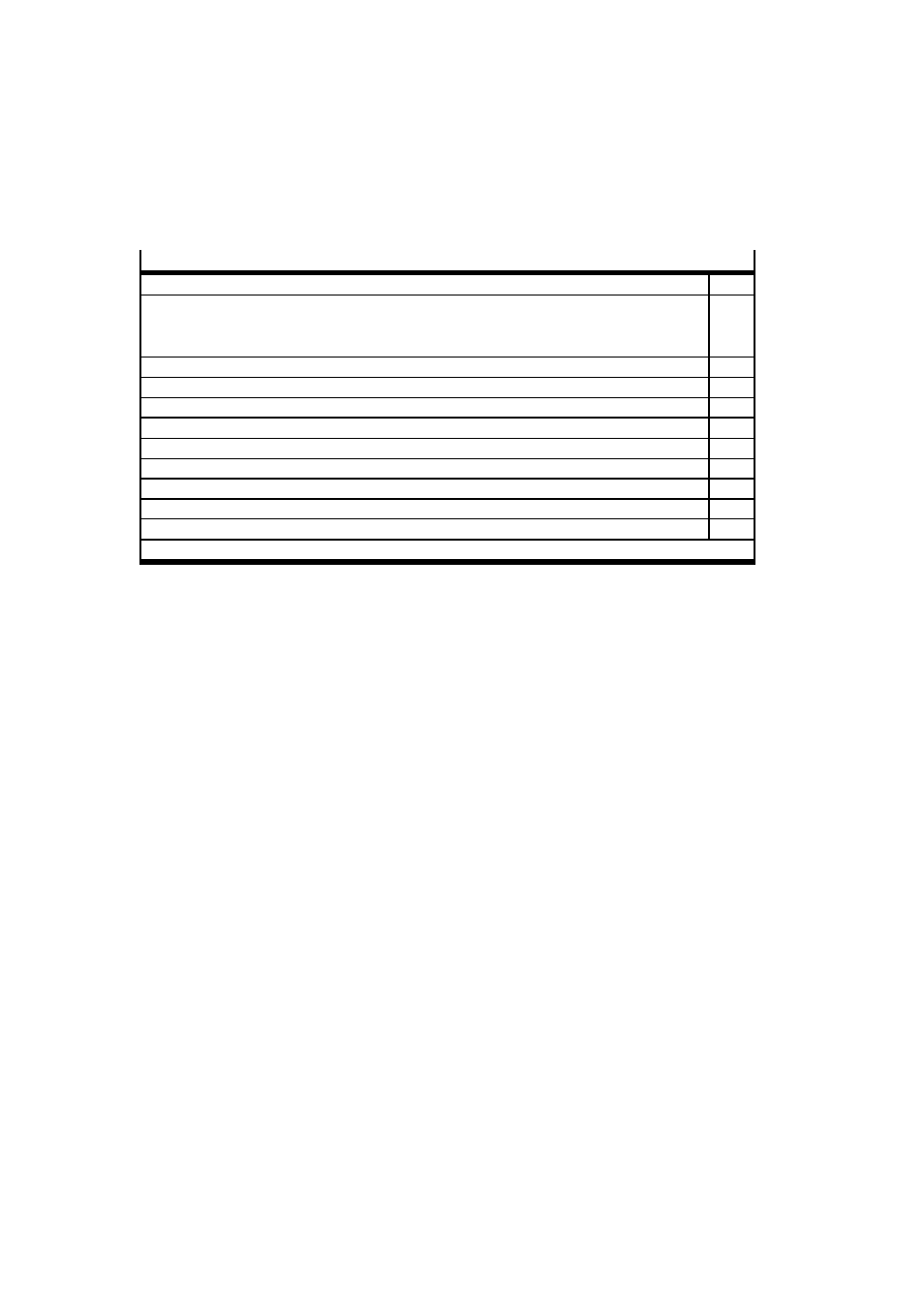
Parameter overview/objects for record table – speed mode
FCT
Record type:
Type “V” = speed mode without stroke limit
Type “VSL” = speed mode with stroke limit
x
Stroke limit (type “VSL” only)
x
Speed
x
Acceleration
1)
x
Deceleration (i.e. braking)
1)
x
Max. jerk
1)
x
Max. force
1)
x
Deviation (speed following error)
x
Comments (max. 32 characters per record)
x
Applied load (linear axis: workpiece mass; axis of rotation: inertia)
x
Other CVE objects: #31 record number preselection; #141 current record number.
1)
These parameters always have a positive prefix.
Tab. 5.9
Parameters for record table during speed mode
Target recognition (Motion complete/MC)
The “target” of a speed record is deemed to have been reached if the following two conditions are
fulfilled:
–
The actual speed is located in the target speed window (identical for all positioning records,
FCT, “Messages” page).
–
The first condition has at least been fulfilled over the specified time period (“MC damping time”,
identical for all records,
FCT, “Messages” page).
Behaviour after target recognition:
–
In
closed-loop operation: As long as no other drive function is executed, the drive will continue to
run at the setpoint speed. Monitoring of the speed deviation remains active until a new drive func-
tion is executed. The force is limited to the maximum value specified in the speed record. Stroke
limitation remains active. If there are deviations from the parameterised speed, a following error is
reported.
–
In
open-loop operation: As long as no other drive function is executed, the drive will continue to run
with the parameterised current. Stroke limitation remains active. Deviations from the nominal
speed are not detected.