Festo Электроцилиндр User Manual
Page 67
5
Commissioning
Festo – GDCP-CMMO-ST-EA-SY-EN – 1301a – English
67
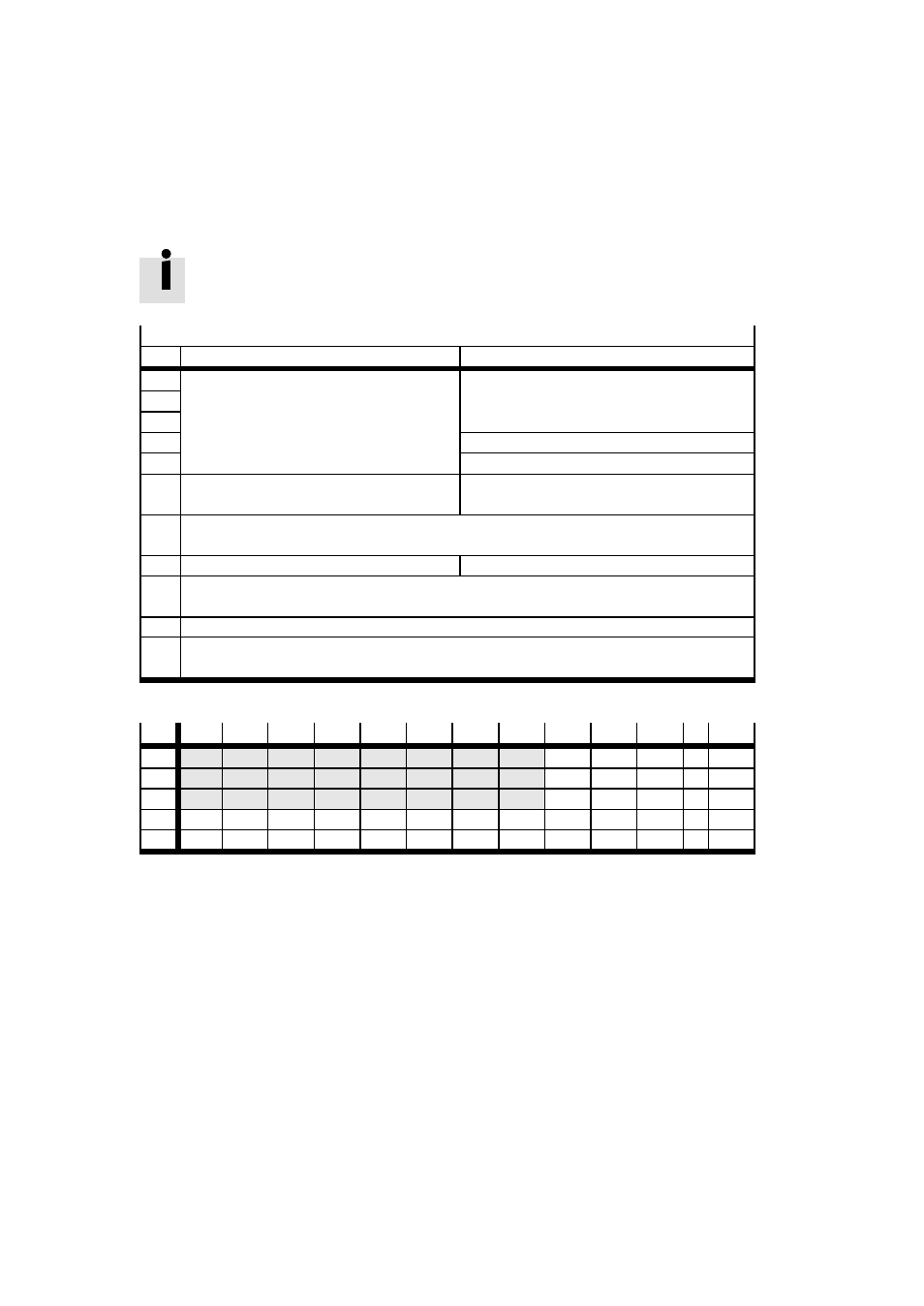
Assigning the inputs and outputs
The binary profile has two modes:
–
You can execute records in
Mode 0 (positioning mode, force mode or speed mode).
–
You can jog and teach in
Mode 1.
You can switch between the two modes by using input no. 8.
Binary profile: Inputs
DIN
Mode 0: Normal operation
Mode 1: Jogging and teaching
1
Record 0 … 31
(Record 0 =
homing)
These inputs are evalu-
ated together.
Coding:
Tab. 5.6.
Record 1 … 7
(Record 0 cannot
be taught)
These inputs are
evaluated together.
Coding:
Tab. 5.6.
2
3
4
JOG+
Jog positive
5
JOG–
Jog negative
6
Start
Starts a record.
TEACH
Transfer current position in
position record.
7
PAUSE
Removal of the physical signal stops the drive
(this input is inverted, i.e. negative logic)
8
Mode 0
Normal operation
Mode 1
Jog/teach
9
BRAKE
Setting the input opens the brake. Only relevant if the controller is not
enabled, i.e. not in a “Ready” state.
10
ENABLE
Activate/enable the controller, release brake.
11
RESET
Acknowledge error - or - delete remaining path (if a position record has
been interrupted with input 7).
Tab. 5.5
Binary profile: Inputs
DIN
REF
1
2
3
4
5
6
7
8
9
10
…
31
1
0
1
0
1
0
1
0
1
0
1
0
…
1
2
0
0
1
1
0
0
1
1
0
0
1
…
1
3
0
0
0
0
1
1
1
1
0
0
0
…
1
4
0
0
0
0
0
0
0
0
1
1
1
…
1
5
0
0
0
0
0
0
0
0
0
0
0
…
1
Tab. 5.6
Binary coding of the records