Festo Электроцилиндр User Manual
Page 45
5
Commissioning
Festo – GDCP-CMMO-ST-EA-SY-EN – 1301a – English
45
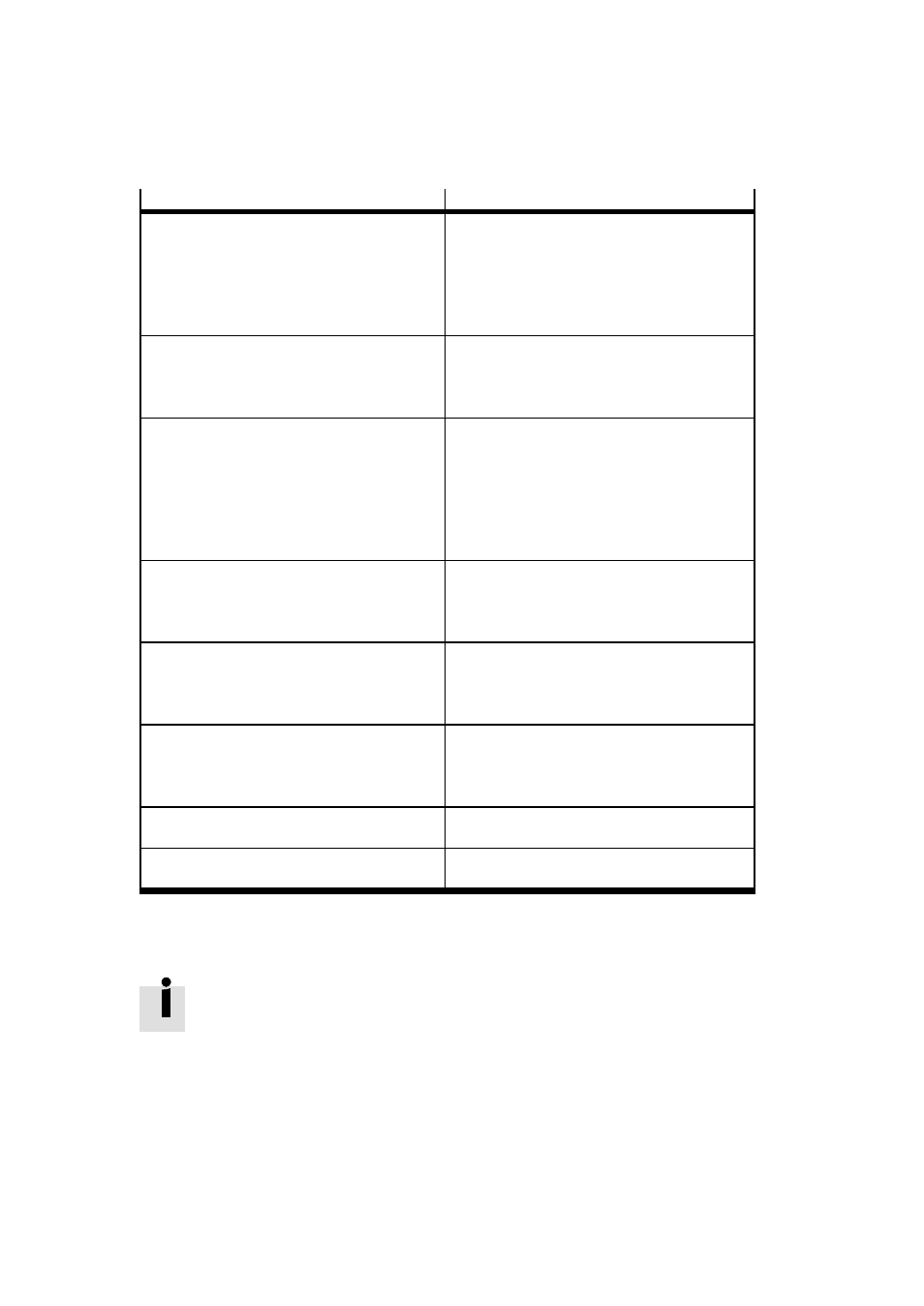
The parameter files for EPCO drives include the following settings, for example:
Parameters
Default setting
Control Profile
Valve profile (7), i.e. 7 position records can be
parameterised via web servers, for example:
–
target position (absolute/relative)
–
travel speed
–
acceleration (start up/braking)
–
reduction of the feed force (force limit)
Reference travel method (controlled operation)
–
negative stop (motor-side) with movement to
zero
–
force limit for stop detection
–
movement to zero 3 mm
Reference travel speeds:
–
Search speed
(travel to the switch/stop)
–
Creep speed
(travel to the switch edge/index pulse)
–
Positioning speed
(travel to the axis zero point)
–
2.5 % of the maximum speed
1)
–
1.25 % of the maximum speed
1)
–
5 % of the maximum speed
1)
Dimensional reference system:
–
Position of the axis zero point
–
Software limit switch (negative)
–
Software limit switch (positive)
–
+ 3 mm from the mechanical stop
–
– 3 mm
–
(stroke length – 3 mm)
Jogging
–
Speed phase 1 (slow travel)
–
Duration of phase 1
–
Speed phase 2 (fast travel)
–
1.25 % of the maximum speed
1)
–
2 s
–
5 % of the maximum speed
1)
Condition for the “Position reached” message
(Motion complete)
–
Target window
–
Message Delay
–
+/- 0.2 mm
–
100 ms
STOP button in the web browser
Deceleration ramp of the current function
(e.g. of the current record)
Quick Stop (triggered by the controller,
e.g. in the event of a serious error)
70 % of the maximum deceleration
1)
1)
The maximum values for speed, acceleration, force, etc. depend on the mechanical system used and can be read via FCT if
required.
Tab. 5.2
Valve profile: default values (EPCO)
All other settings of the parameter files can be read in FCT as needed.