FEC FUSIONE-HS-2 User Manual
Page 121
FEC Fusion Operations Manual Chapter 6: Fastening Instructions (Rev. 2)
Page 6-25
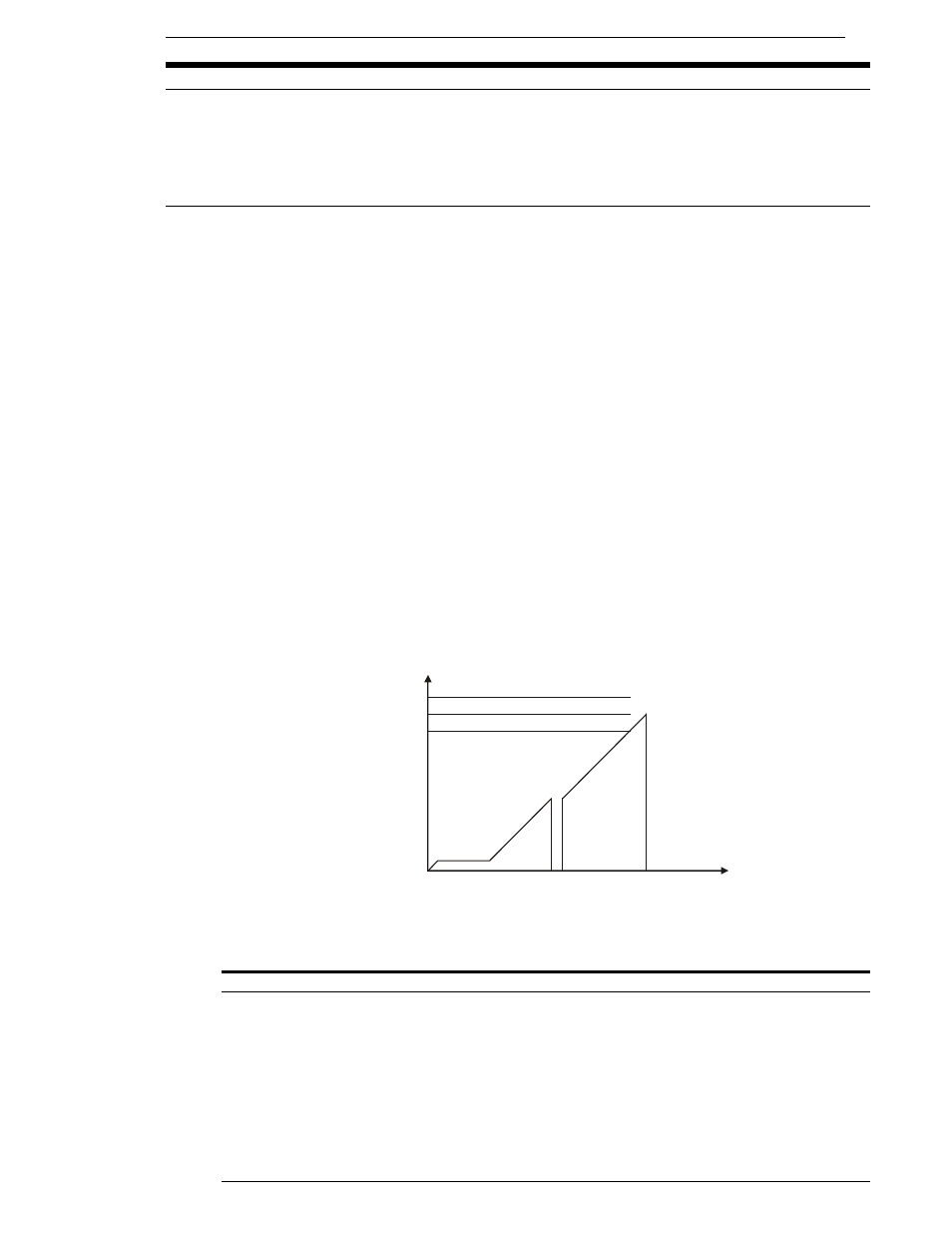
FASTENING CURRENT LIMIT
C
U
R
R
E
N
T
TIME / ANGLE
LOW CURRENT LIMIT
HIGH CURRENT LIMIT
FULL SCALE CURRENT
6.6
Added Functions
Additional functions are available as standard features integrated within the Fusion controller. These
functions may be helpful in special applications or for maintenance reasons. See below for additional
functions.
6.6.1 Current Monitoring / Control
The current monitoring function works as a redundant protection for the torque transducer operations.
By sensing the current drawn by the motor, the system can establish an alternate reference to the
signals generated by the torque transducer preamplifier. It is intended to detect problems with the mo-
tor that would not be detected by the torque transducer and also as a maintenance tool to determine
if there is a problem before the system will shut down.
This function allows the user to set Low Current and High Current Limits. If the current drawn by the
motor overrides the High Current Limit or does not achieve the Low Current Limit, the System acti-
vates the Current Warning PLC Output Signal, without halting the System's operation. This current
warning signal prompts of a potential failure in the system that requires inspection, but allows the sys-
tem to continue until a suitable time is available to inspect the system.
The Fastening current limit allows a limit for maximum current draw during a fastening cycle. If this is
set below Full Scale Current, then the current will not exceed this value during a fastening cycle. This
function is mainly for protecting a motor during Torque recovery applications. If the Fastening Current
Limit is exceeded and the motor stops turning, a Resolver Abnormal fault may occur.
The Full scale current limit is an automatically set reference value. This is generated based upon the
motor/servo used and should not be changed.
Fig. 6-6-1 Current Monitor function