Status and control, Ross status view, Status and control -2 – Comtech EF Data VMS v3.12.x Vipersat User Manual
Page 290: Ross status view -2, Figure 5-1 ross status view, viperview
Status and Control
MN/22156, rev 12
5-2
VMS User Guide
Status and Control
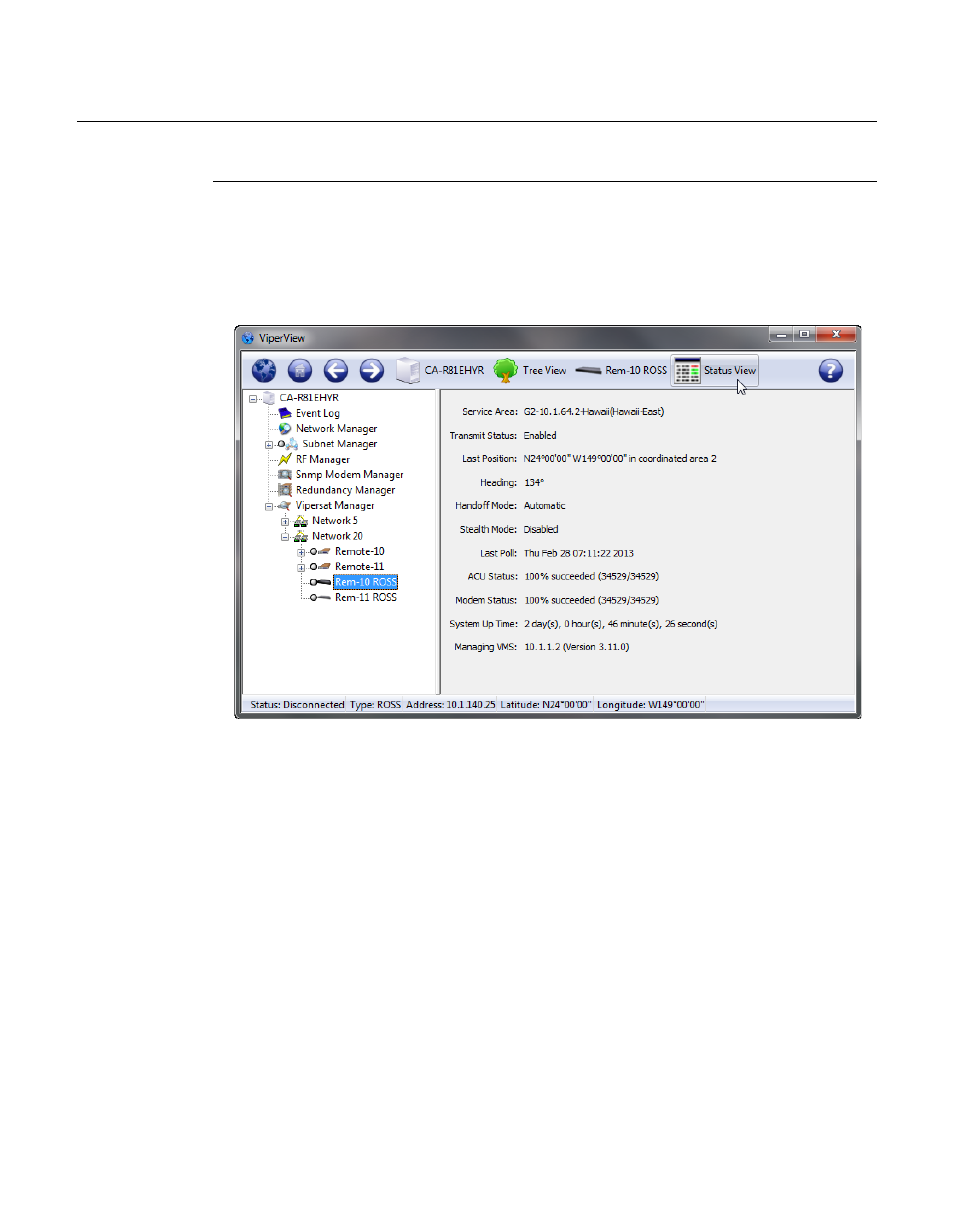
ROSS Status View
The status information for any Vipersat network ROSS can be displayed in the
right panel from the Status View interface within ViperView (figure 5-2) by
clicking on the ROSS unit appearance in the left panel. To display the current
status, select the Refresh command from the Status View menu.
Figure 5-1 ROSS Status View, ViperView
The following status information is provided:
• Service Area – Identifies the existing service area for this ROSS.
• Transmit Status – Indicates whether the transmit is Enabled or Disabled.
When the status is enabled, the ROSS is in a valid service area and the
communication poll status of the associated modem and the ACU are
successful. When the status is disabled, the modulator transmit carrier is
muted, regardless of any other controls.
• Last position – Identifies the latitude and longitude coordinates, in
decimal degrees, that were retrieved from the most recent ACU poll. If the
reported position is within a coordinated area, the coordinated area ID will
be displayed adjacent to the coordinates. ROSS polls the ACU for position
on a five second interval. This value is updated by the Refresh command.