1 inputs_mctrl, System modules, Mctrl_motorcontrol (node number 131) inputs_mctrl – Lenze ECSCAxxx User Manual
Page 352: 1 inputs_mctrl system variables
System modules
MCTRL_MotorControl (node number 131)
Inputs_MCTRL
l
352
EDBCSXA064 EN 3.2
13.20.1
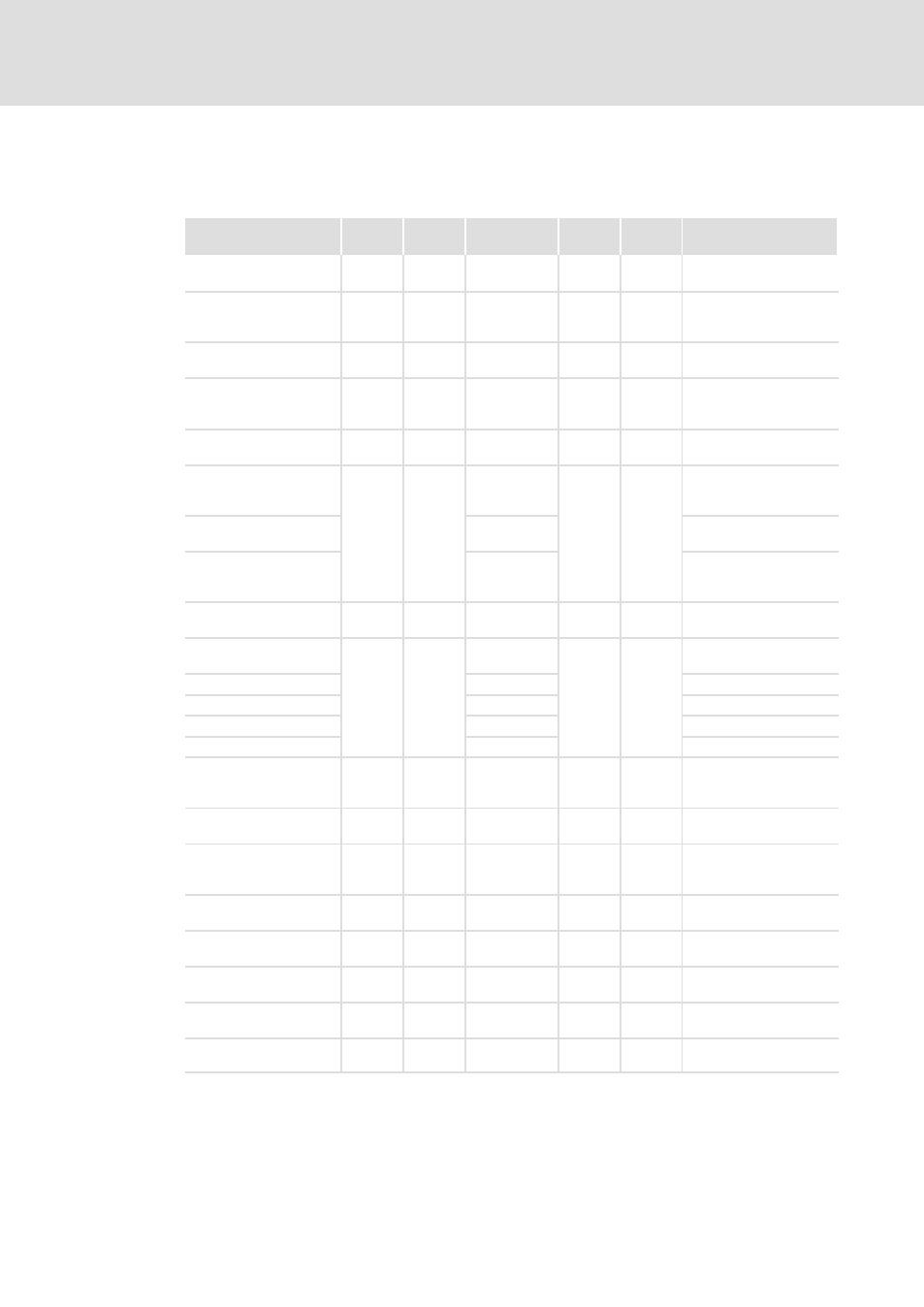
Inputs_MCTRL
System variables
Variable
Data
type
Signal
type
Address
Display
code
Display
format
Comments
MCTRL_bQspIn_b
BOOL
binary
%IX131.0.0.0
C0042
bin
TRUE = drive carries out
quick stop (QSP)
MCTRL_nNSetIn_a
integer
analog
%IW131.1
C0050
dec [%]
Speed setpoint
l
16384
º 100 % n
max
(C0011)
MCTRL_bMMax_b
BOOL
binary
%IX131.0.2
˘
˘
TRUE = speed controller
operates in limitation
MCTRL_nMSetIn_a
integer
analog
%IW131.3
C0056
dec [%]
Torque setpoint
l
16384
º 100 % M
max
(C0057)
MCTRL_bIMax_b
BOOL
binary
%IX131.0.1
˘
˘
TRUE = drive operates at
limit C0022
MCTRL_nIAct_a
integer
analog
%IW131.5
˘
˘
Actual motor current
l
16384
º 100 % I
max
(C0022)
MCTRL_nDCVolt_a
%IW131.6
DC voltage
l
16384
º 1000 V
MCTRL_nMAct_a
%IW131.4
Current torque
l
16384
º 100 % M
max
(C0057)
MCTRL_wMmaxC57
Word
˘
%IW131.16
˘
˘
Display of maximum
torque (C0057) x 10
MCTRL_bUnderVoltage_
b
BOOL
binary
%IX131.0.3
˘
˘
Monit: undervoltage
MCTRL_bOverVoltage_b
%IX131.0.4
Monit: overvoltage
MCTRL_bShortCircuit_b
%IX131.0.5
Monit: short circuit
MCTRL_bEarthFault_b
%IX131.0.6
Monit: earth fault
MCTRL_bIxtOverload_b
%IX131.9.2
Monit: I x t − overload
MCTRL_nPos_a
integer
analog
%IW131.7
˘
˘
Actual phase value as
analog signal
l
90°
º 100%
MCTRL_nNAct_v
integer
Velocity
%IW131.8
˘
˘
Actual speed value
[inc/ms]
MCTRL_nNAct_a
integer
analog
%IW131.2
˘
˘
Actual speed value
l
16384
º 100 % n
max
(C0011)
MCTRL_dnPos_p
double
integer
position
%ID131.5
˘
˘
Rotor position of the
motor
MCTRL_bNmaxFault_b
BOOL
binary
%IX131.0.7
˘
˘
Monit: max. system
speed exceeded
MCTRL_nNmaxC11
integer
˘
%IW131.15
˘
˘
Display of max. speed
(C0011)
MCTRL_bActTPReceived_
b
BOOL
binary
%IX131.0.10
˘
˘
Receive touch probe (TP)
MCTRL_dnActIncLastScan
_p
double
integer
position
%ID131.6
˘
˘
Dinc during TP and task
start