Modbus – IAI America ROBO Cylinder Series User Manual
Page 62
4. Communicationn
54
Modbus
Reference page
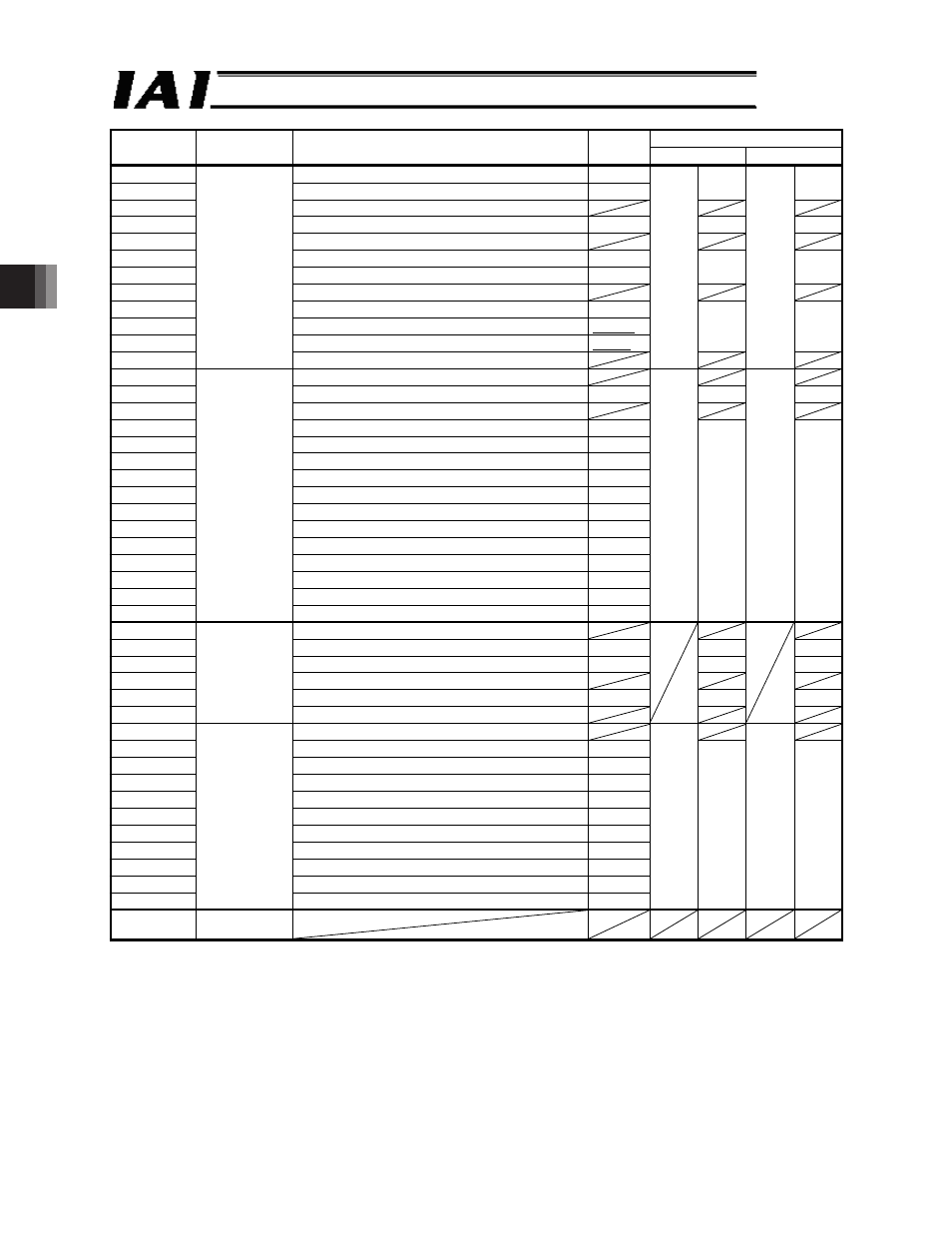
Address
[HEX]
Area name
Description
Symbol
RTU
ASCII
0400
EMG operation specification
EMG
0401
Safety speed command
SFTY
33
33
0402
Cannot be used
0403
Servo ON command
SON
33
33
0404 to 0406
Cannot be used
0407
Alarm reset command
ALRS
0408
Brake forced-release command
BKRL
33
33
0409
Cannot be used
040A
Pause command
STP
040B
Home return command
HOME
040C
Positioning start command
CSTR
33
33
040D to 040F
Device control
register 1
(DRG1)
Cannot be used
(149)
(276)
0410
Cannot be used
0411
Jog/inch switching
JISL
34
34
0412 to 0413
Cannot be used
0414
Teaching mode command
MOD
0415
Position data load command
TEAC
0416
Jog+ command
JOG+
0417
Jog command
JOG-
0418
Start position 7
ST7
0419
Start position 6
ST6
041A
Start position 5
ST5
041B
Start position 4
ST4
041C
Start position 3
ST3
041D
Start position 2
ST2
041E
Start position 1
ST1
041F
Device control
register 2
(DRG2)
Start position 0
ST0
(149)
34
(276)
34
0420 to 0425
Cannot be used
0426
Load cell calibration command
CLBR
142
270
0427
PIO/Modbus switching specification
PMSL
144
272
0428 to 042B
Cannot be used
042C
Deceleration stop
STOP
146
274
042D to 042F
Expansion
device control
register
(DRGE)
Cannot be used
0430 to 0435
Cannot be used
0436
Position command bit 512
PC512
0437
Position command bit 256
PC256
0438
Position command bit 128
PC128
0439
Position command bit 64
PC64
043A
Position command bit 32
PC32
043B
Position command bit 16
PC16
043C
Position command bit 8
PC8
043D
Position command bit 4
PC4
043E
Position command bit 2
PC2
043F
Position
number
specification
register
(POSR)
Position command bit 1
PC1
(149)
35
(276)
35
0440 to FFFF Reserved for
system