Modbus – IAI America ROBO Cylinder Series User Manual
Page 44
4. Communicationn
36
Modbus
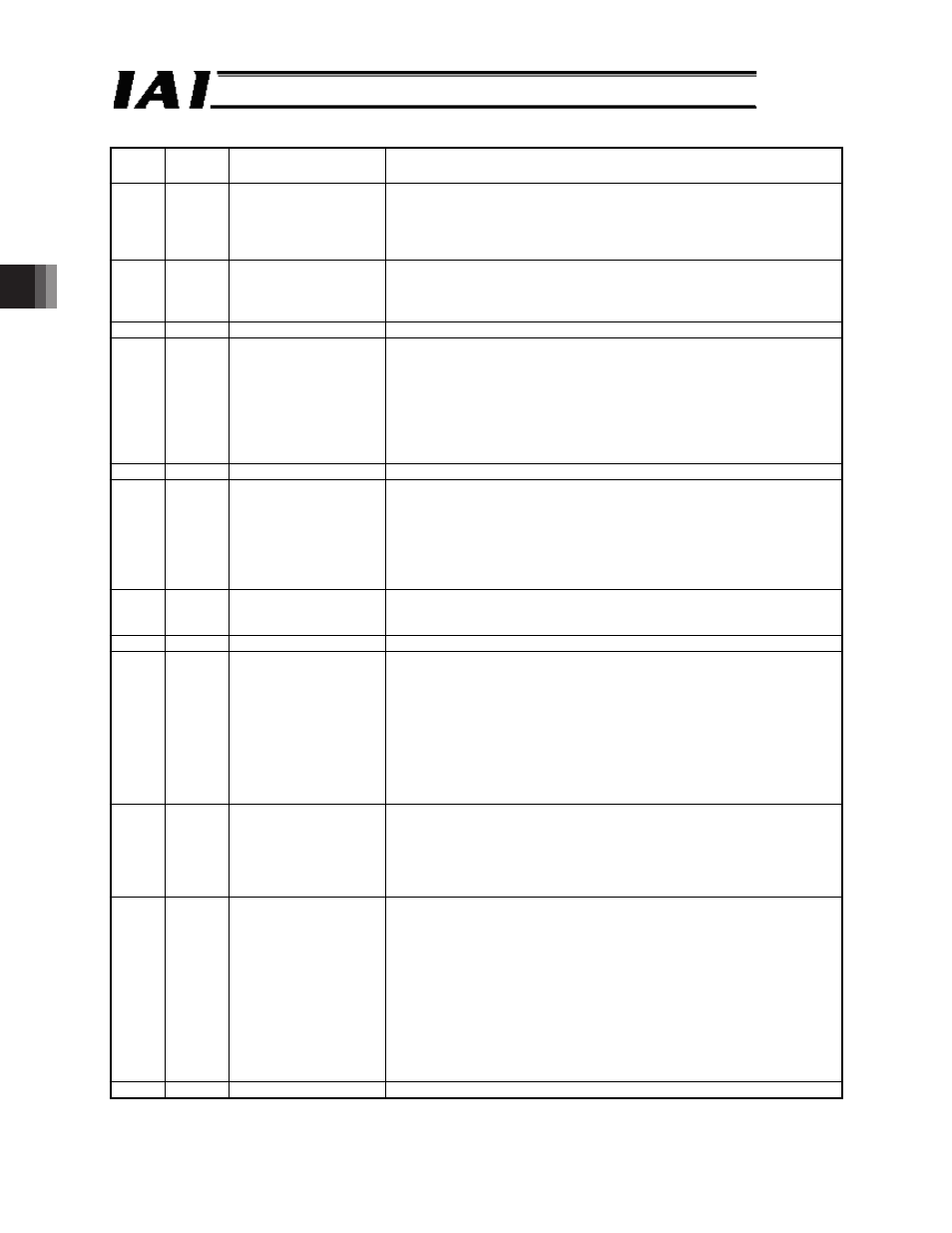
(5) Data of device control register 1 (Address = 0D00
H
) (DRG1)
Bit
Symbol
Name
Function
15
EMG
EMG operation
specification
0: Emergency stop not actuated
1: Emergency stop actuated
Changing this bit to 1 will switch the controller to the emergency stop mode.
Take note that the drive source will not be cut off.
(The ALM LED on the controller will not illuminate.)
14
SFTY
Safety speed command 0: Disable safety speed
1: Enable safety speed
Changing this bit to 1 will limit the speeds of all movement commands to the
speed specified by user parameter No. 35, “Safety speed.”
13
-
Cannot be used
12
SON
Servo ON command
0: Servo OFF
1: Servo ON
Changing this bit to 1 will turn the servo ON. However, the following
conditions must be satisfied:
x
Device status register 1 (5.3.11 or 6.4.11): The EMG status bit is 0.
x
Device status register 1 (5.3.11 or 6.4.11: The major failure status is 0.
x
Device status register 2 (5.3.12 or 6.4.12): The enable status bit is 1.
x
System status register (5.3.9 or 6.4.9): The auto servo OFF status is 0.
11 to 9
Cannot be used
8
ALRS
Alarm reset command
0: Normal
1: Alarm will reset
Present alarms will be reset upon detection of a rising edge for this bit (this
bit: 0 o 1). Note, however, that if any of the causes for the alarm has not
been removed, the same alarm will be generated again.
If a rising edge is detected for this bit (this bit: 0 o 1) during a pause, the
remaining travel will be canceled.
7
BKRL
Brake forced-release
command
0: Normal
1: Forcibly release brake
You can forcibly release the brake by setting this bit to 1.
6
-
Cannot be used
5
STP
Pause command
0: Normal
1: Pause command
All motor movement is inhibited while this bit is 1. If this bit turns 1 while the
actuator is moving, the actuator will decelerate to a stop. When the bit is set
to 0 again thereafter, the actuator will resume the remaining travel.
If this bit is turned 1 while the actuator is performing a home return, the
movement command is held until the actuator reverses upon contact. When
the bit turns 0 thereafter, the actuator will complete the remaining home
return operation automatically. However, make sure you perform a home
return again after the actuator reverses upon contact.
4
HOME
Home return command
0: Normal
1: Home return command
Home return will start when a rising edge is detected for this bit (this bit: 0 o
1). Once the home return is completed, the HEND bit will become 1. You
can input a home return command again even if the actuator has already
completed a home return.
3
CSTR
Positioning start
command
0: Normal
1: Position start command
When a rising edge is detected for this bit (this bit: 0 o 1), the actuator will
move to the target position of the position number stored in the position
number specification register (POSR:0D03
H
). If this bit remains 1, a position
complete will not be output even when the actuator enters the positioning
band (return to the normal status by writing 0 to this bit).
If this command is executed before home return has been performed at
least once after the power was turned on (the HEND bit is 0), the actuator
will perform home return and then start moving to the target position.
* Set the target position, speed, etc., in the position table of the controller
beforehand.
2 to 0 -
Cannot be used