Modbus – IAI America ROBO Cylinder Series User Manual
Page 194
6. Modbus
ASCII
186
Modbus
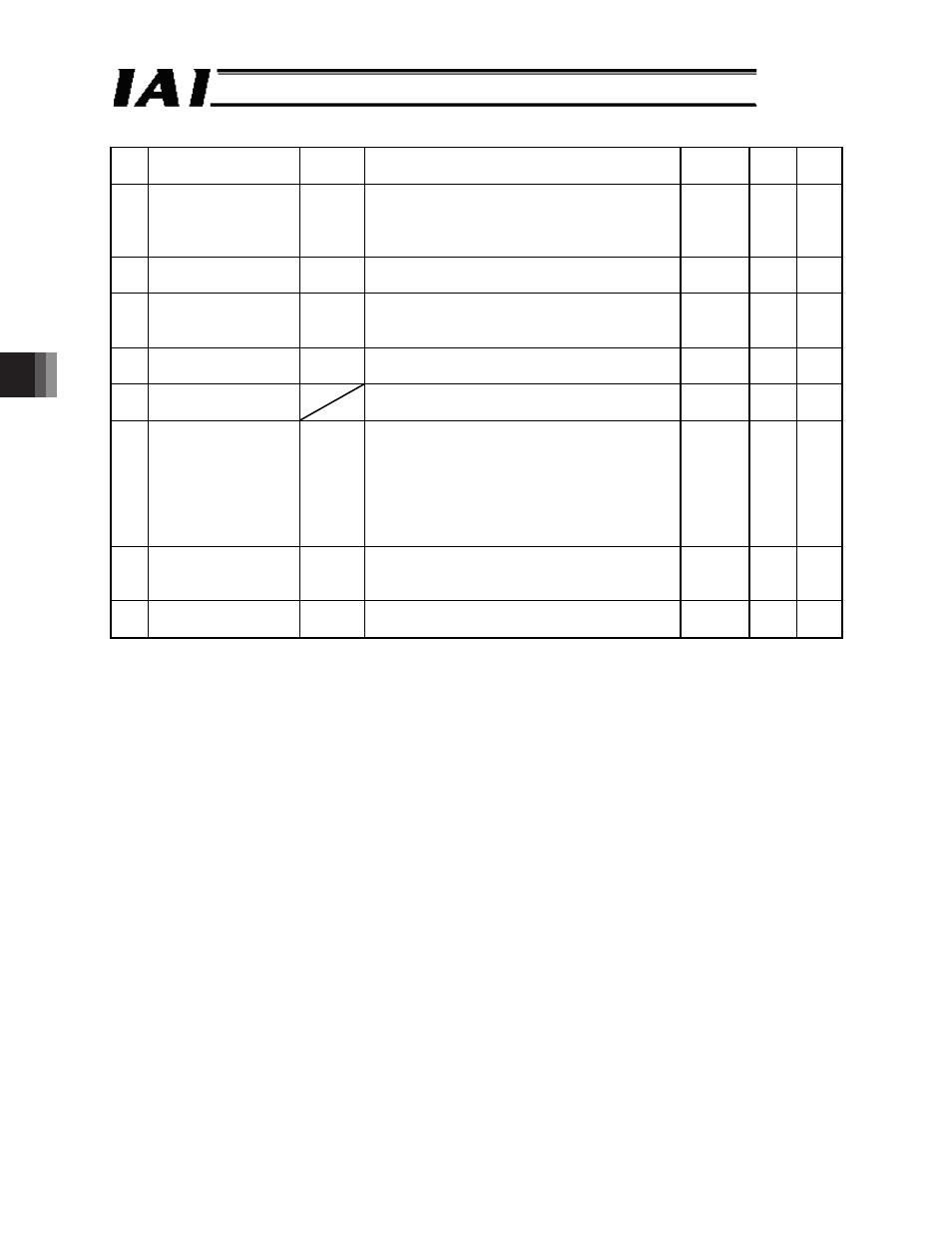
FC
Function
Symbol
Function
Combination
with PIO
Broad-
cast Page
05 Position number
specification 0 to 7
ST0 to
ST7
This function specifies position numbers
effective only in the solenoid valve mode.
The actuator can be operated with this
command alone.
{
268
05 Load cell calibration
command
CLBR Calibrate the load cell.
{
270
05 PIO/Modbus
switching setting
PMSL
This function issues a command to
enable/disable PIO external command
signals.
{
272
05 Deceleration stop
STOP This function can decelerate the actuator to
a stop.
{
274
06 Direct control
information write
Change (write) the content of the controller’s
register.
{
276
10 Numerical
movement command None
This function can be used to send the target
position, positioning band, speed,
acceleration/deceleration, push, and control
setting in a single message to operate the
actuator. Normal movement, relative
movement and push-motion operation are
supported.
{
280
10 Position data table
write
None
This function can be used to change all data
of the specified position number for the
specified axis.
{
298
Indeter-
minable
Exception response None This response will be returned when the
message contains invalid data.
306