Modbus – IAI America ROBO Cylinder Series User Manual
Page 57
4. Communication
49
Modbus
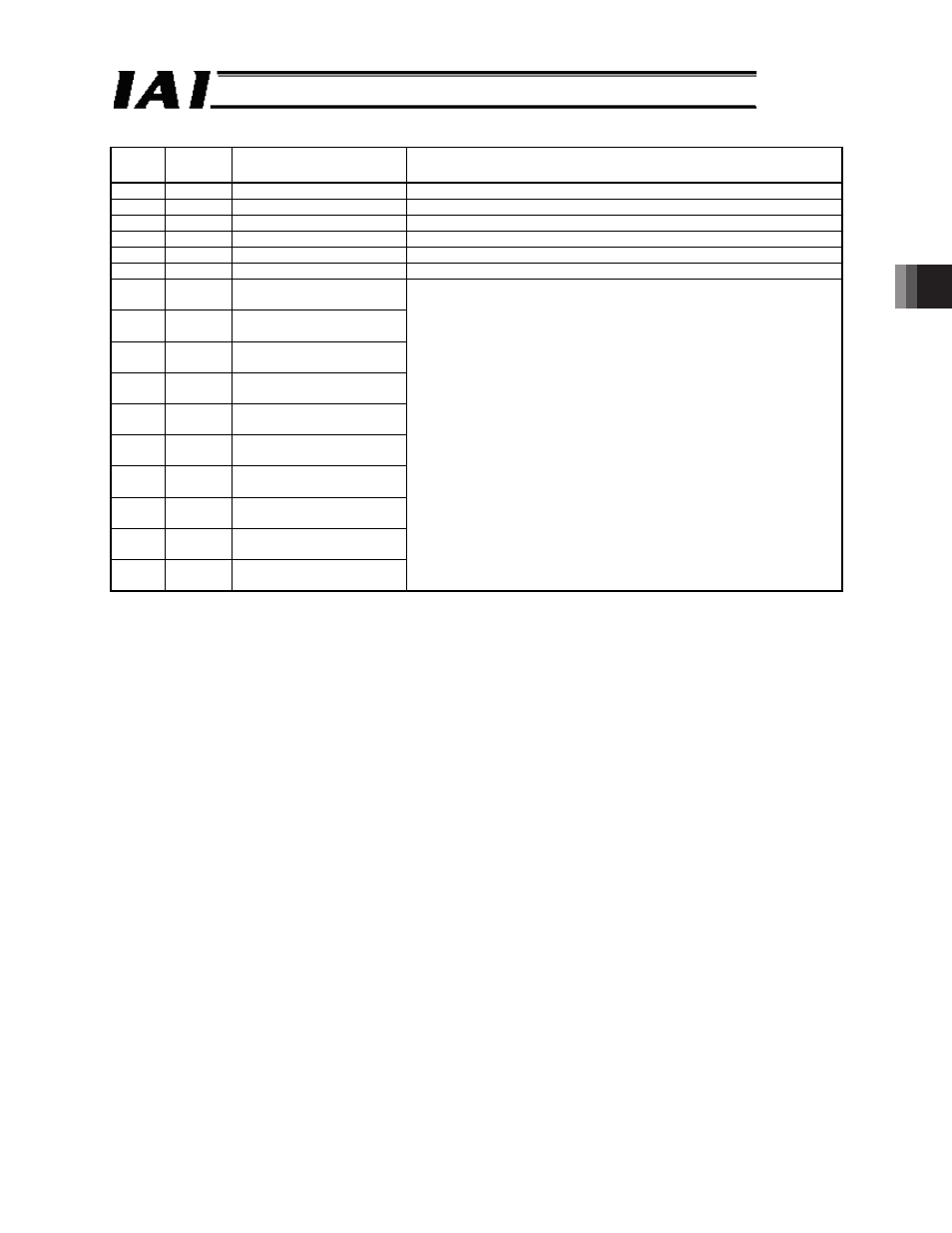
(18) Data of position number status register (Address = 9014
H
) (POSS)
Bit
Symbol
Name
Function
15
-
Cannot be used
14
-
Cannot be used
13
-
Cannot be used
12
-
Cannot be used
11
-
Cannot be used
10
-
Cannot be used
9
PM512
Position complete number
status bit 512
8
PM256
Position complete number
status bit 256
7
PM128
Position complete number
status bit 128
6
PM64
Position complete number
status bit 64
5
PM32
Position complete number
status bit 32
4
PM16
Position complete number
status bit 16
3
PM8
Position complete number
status bit 8
2
PM4
Position complete number
status bit 4
1
PM2
Position complete number
status bit 2
0
PM1
Position complete number
status bit 1
These bits indicate position numbers for which positioning has been
completed (valid in cases other than PIO patterns 4 and 5 (solenoid
valve mode)). The position complete is read as binary code.
It becomes possible to read position complete numbers when the current
position gets close to the target position (within the positioning band in
either the positive or negative directions). 0 is read in other cases.
Although all the bits will change to 0 once the servo turns OFF, the
position complete becomes valid again if the current position is still
inside the positioning band when the servo is turned ON subsequently.
In push-motion, the position complete numbers can be read at both the
completion and miss of push-motion.