Modbus – IAI America ROBO Cylinder Series User Manual
Page 45
4. Communication
37
Modbus
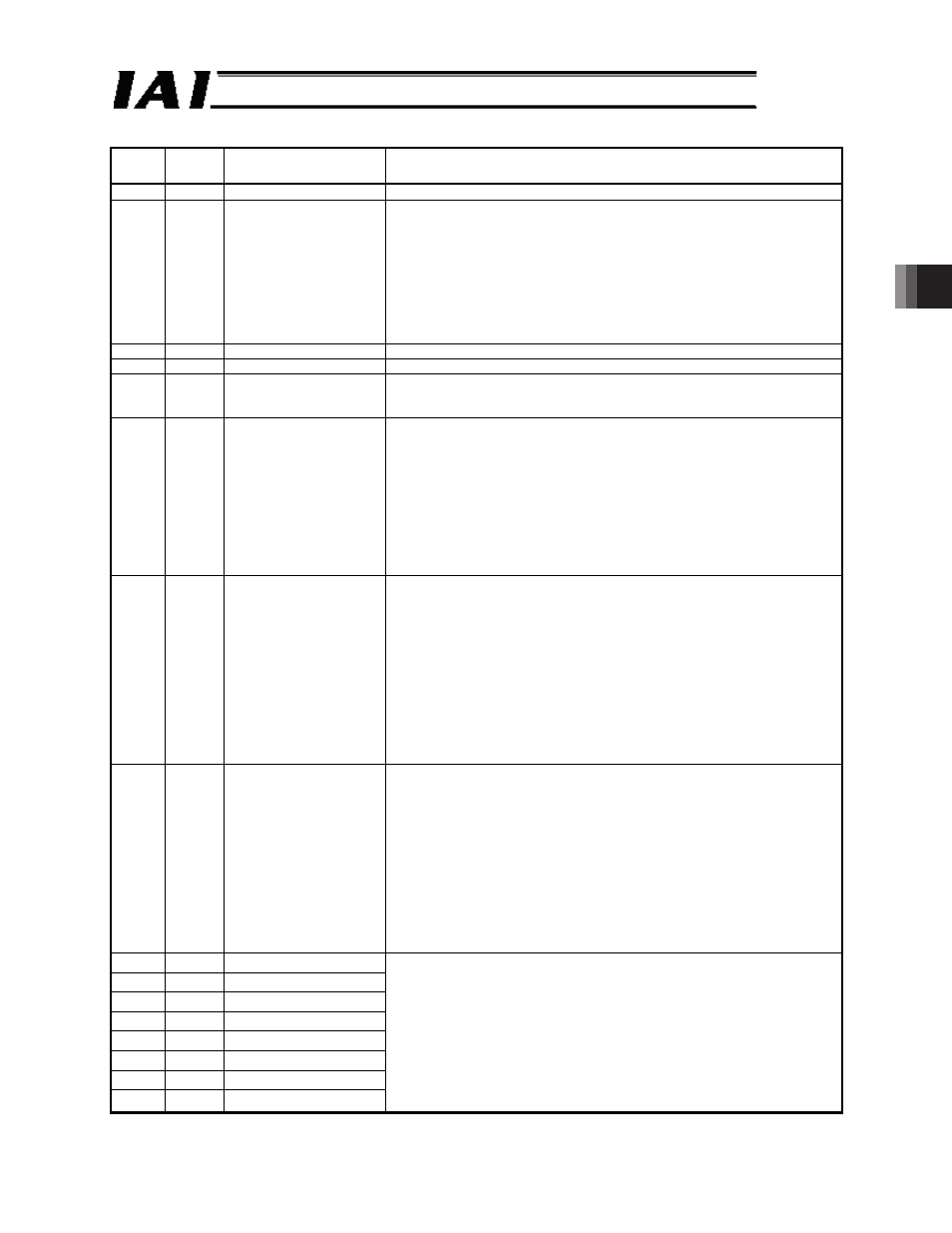
(6) Data of device control register 2 (Address = 0D01
H
) (DRG2)
Bit
Symbol
Name
Function
15
-
Cannot be used
14
JISL
Jog/inch switching
0: Jog
1: Inching
When this bit is 0, the jog operation is selected. When this bit is 1, the inching
operation is selected.
If this bit turns 1 while the actuator is jogging, the actuator will accelerate to a
stop.
While the actuator is inching, turning this bit 0 will have no effect and the actuator
will continue with the inching operation.
The setting of this bit is not reflected in any jog/inching operation set from the
teaching tool.
13
-
Cannot be used
12
-
Cannot be used
11
MOD
Teaching mode command 0: Normal operation mode
1: Teaching mode
Changing this bit to 1 will switch the controller to the teaching mode.
10
TEAC
Position data load
command
0: Normal
1: Position data load command
The current position data will be written to the position number specified by the
position number specification register if 1 is written to this bit while the 11th bit of
the teach mode command is 1 (teaching mode).
The current position data is loaded to the position data line specified by the
position number specification register. If the position number under which the
data is loaded is an empty position, meaning that no data is currently set, the
data fields other than target position (such as positioning band, etc.) will be
automatically populated by the default values of the respective parameters.
Make sure that after this bit is set to 1, it will remain 1 for at least 20 ms.
9
JOG+
Jog+ command
0: Normal
1: Jog+ command
x
The actuator jogs in the direction opposite home as long as this bit is 1 if the
14th JISL bit is 0. The speed and acceleration/deceleration match the
specifications in user parameter No. 26 “PIO jog speed” and rated
acceleration/deceleration speed.
If this bit is set to 0 or the 8th bit of the jog-command is changed to 1, the
actuator will decelerate to a stop.
x
If a positive edge (this bit: 0 o 1) is detected for the jog+ command while the
14th JISL bit is 0, the actuator inches in the direction opposite home.
The speed, travel and acceleration/deceleration speed match the specifications
in user defined parameter No. 26 (PIO jog speed), user parameter No. 48 (PIO
inching distance) and rated jog acceleration/deceleration, respectively.
8
JOG-
Jog- command
0: Normal
1: Jog- command
x
The actuator jogs in the direction of home as long as this bit is 1 if the 14th
JISL bit is 0. The speed and acceleration/deceleration speed match the
specifications in user parameter No. 26 “PIO jog speed” and rated
acceleration/deceleration speed.
If this bit is set to 0 or the 9th bit of the jog-command is changed to 1, the
actuator will decelerate to a stop.
x
If a positive edge (this bit: 0 o 1) is detected for the jog+ command while the
14th JISL bit is 0, the actuator inches in the direction of home.
The speed, travel and acceleration/deceleration speed match the specifications
in user defined parameter No. 26 (PIO jog speed), user parameter No. 48 (PIO
inching distance) and rated jog acceleration/deceleration, respectively.
7
ST7
Start position 7
6
ST6
Start position 6
5
ST5
Start position 5
4
ST4
Start position 4
3
ST3
Start position 3
2
ST2
Start position 2
1
ST1
Start position 1
0
ST0
Start position 0
(If either of these bits is enabled) The actuator moves to the position of the
specified position number.
These bits are only valid when PIO patterns 4 or 5 (solenoid valve mode) is
selected. The move is started if either of the ST0 to ST7 bits is set to 1 (this bit: 0
o
1).
If a position other than the enabled start poison is selected, the alarm “085
Position No. error at moving” is generated.
You can select the signal input method as “Level” or “Edge” in user parameter
No. 27, “Movement command type.”
If multiple positions are entered at the same time, the smallest number takes the
priority.