Modbus – IAI America ROBO Cylinder Series User Manual
Page 296
6. Modbus
ASCII
288
Modbus
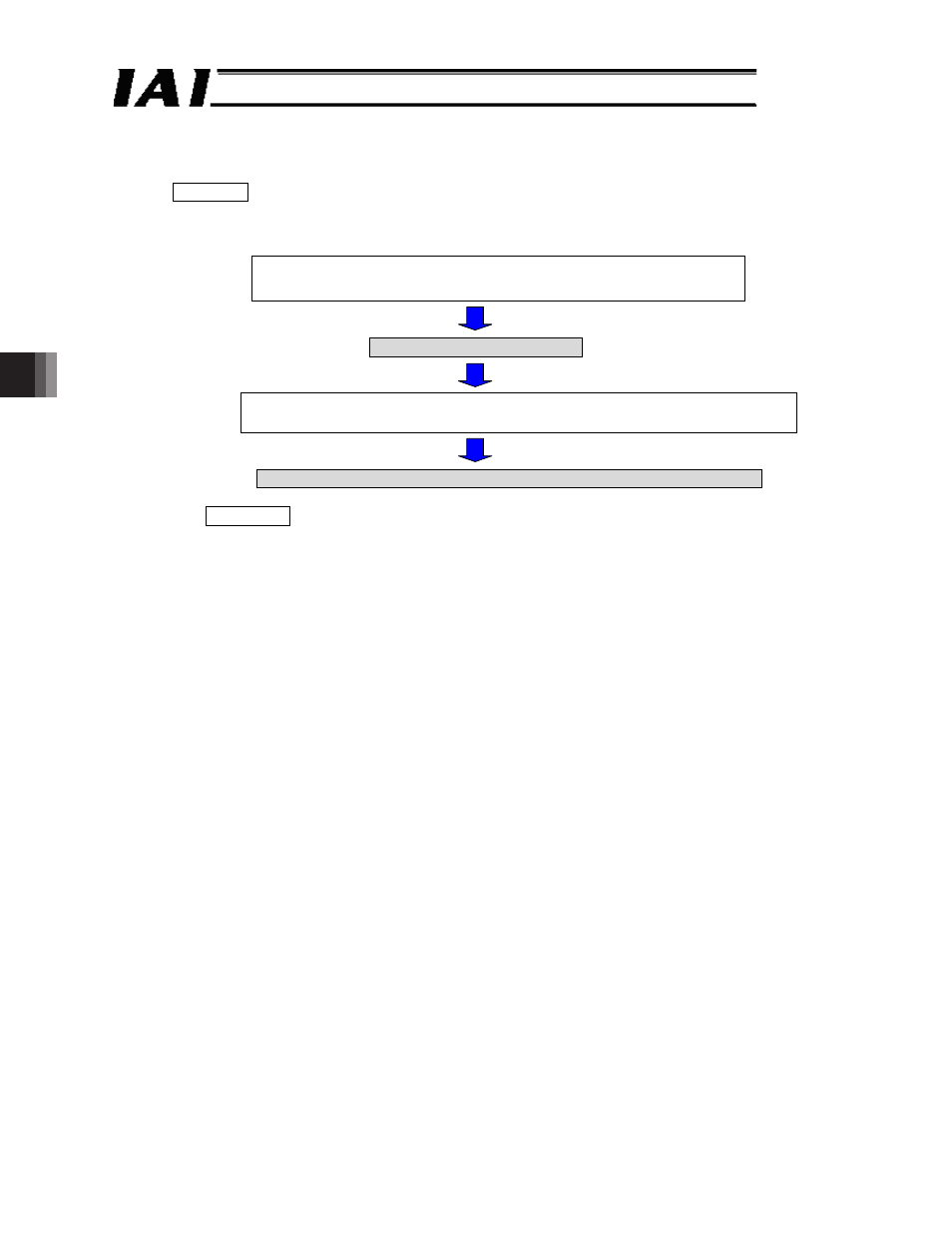
[5] Change the speed during incremental movement (pitch feed).
Conditions: Change the target position, speed and acceleration/deceleration each time the
actuator is moved, with the positioning band changed at a given timing during
movement.
Write the target position specification register (9900
H
) through control
flag specification register (9908
H
: Incremental setting)
(Example 4)
Start of incremental movement
Write the speed specification register (9904
H
) through control flag specification
register (9908
H
: Incremental setting)
(Example 5)
.
The actuator continues with the incremental movement at the new speed.
Supplement: After the control flag specification register (9908
H
) is set, the register will
return to the default value (0
H
: Normal movement) once the actuator starts
moving. Accordingly, you must set the control flag specification register
(9908
H
) and send it again if another incremental or push-motion operation is
to be performed.