Modbus – IAI America ROBO Cylinder Series User Manual
Page 272
6. Modbus
ASCII
264
Modbus
6.5.14 Start Positions 0 to 7 <
(1) Function
The actuator moves to the specified position number position.
The movement command for start positions 0 to 7 is effective only when PIO pattern 4 or 5 (solenoid
valve mode) is selected.
The movement command is sent by enabling either one of ST0 to ST7 in “6.5.14 (5) Start address”
(write new value FF00
H
when 0000
H
is set).
If a position other than the valid start positions is selected, “085: Moving position number error” will
be generated.
Either level operation or edge operation can be selected using user parameter No. 27, “Movement
command type.”
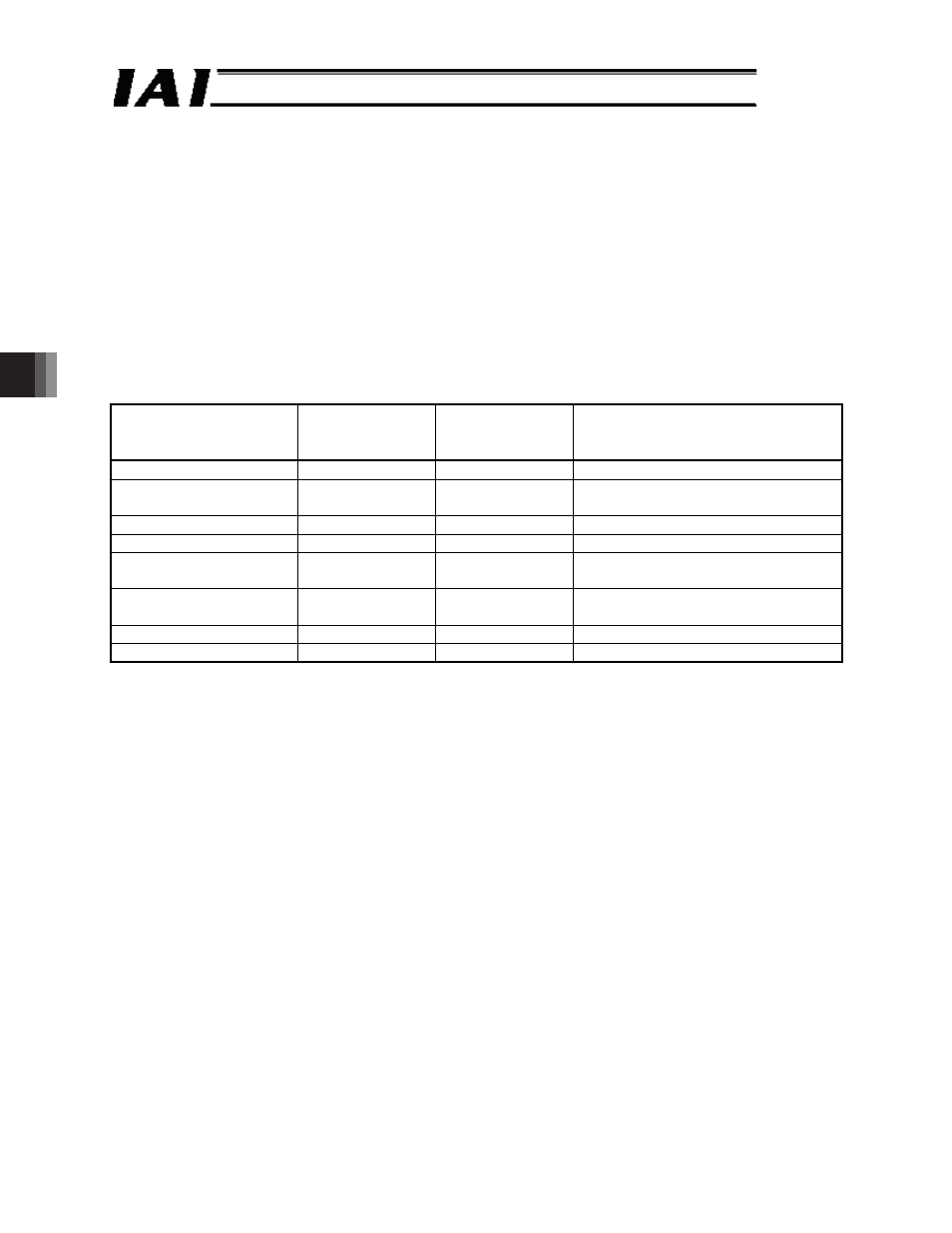
(2) Query format
Field
Number of
characters
ASCII mode
character string
(fixed)
Remarks
Header
1
‘:’
Slave address [H]
2
Arbitrary
Axis number + 1 (01
H
to 10
H
)
00
H
when broadcast is specified
Function code [H]
2
‘0’, ‘5’
Write to a single coil DO
Start address [H]
4
Arbitrary
Refer to 6.5.14 (5), “Start address.”
Changed data [H]
4
Arbitrary
*1 Operation command: ‘F’, ‘F’, ‘0’, ‘0’
Operation command: ‘0’, ‘0’, ‘0’, ‘0’
Error check [H]
2
LRC calculation
result
Trailer
2
‘CR’, ‘LF’
Total number of bytes
17
*1 If user parameter No. 27 “Movement command type” is set to “level operation, ” the actuator
decelerates to a stop by overwriting FF00
H
with 0000
H
.
(3) Response
If the change is successful, the response message will be the same as the query.
If invalid data is sent, an exception response (refer to section 7) will be returned, or no response will
be returned.