Modbus – IAI America ROBO Cylinder Series User Manual
Page 193
6. Modbus
ASCII
185
Modbus
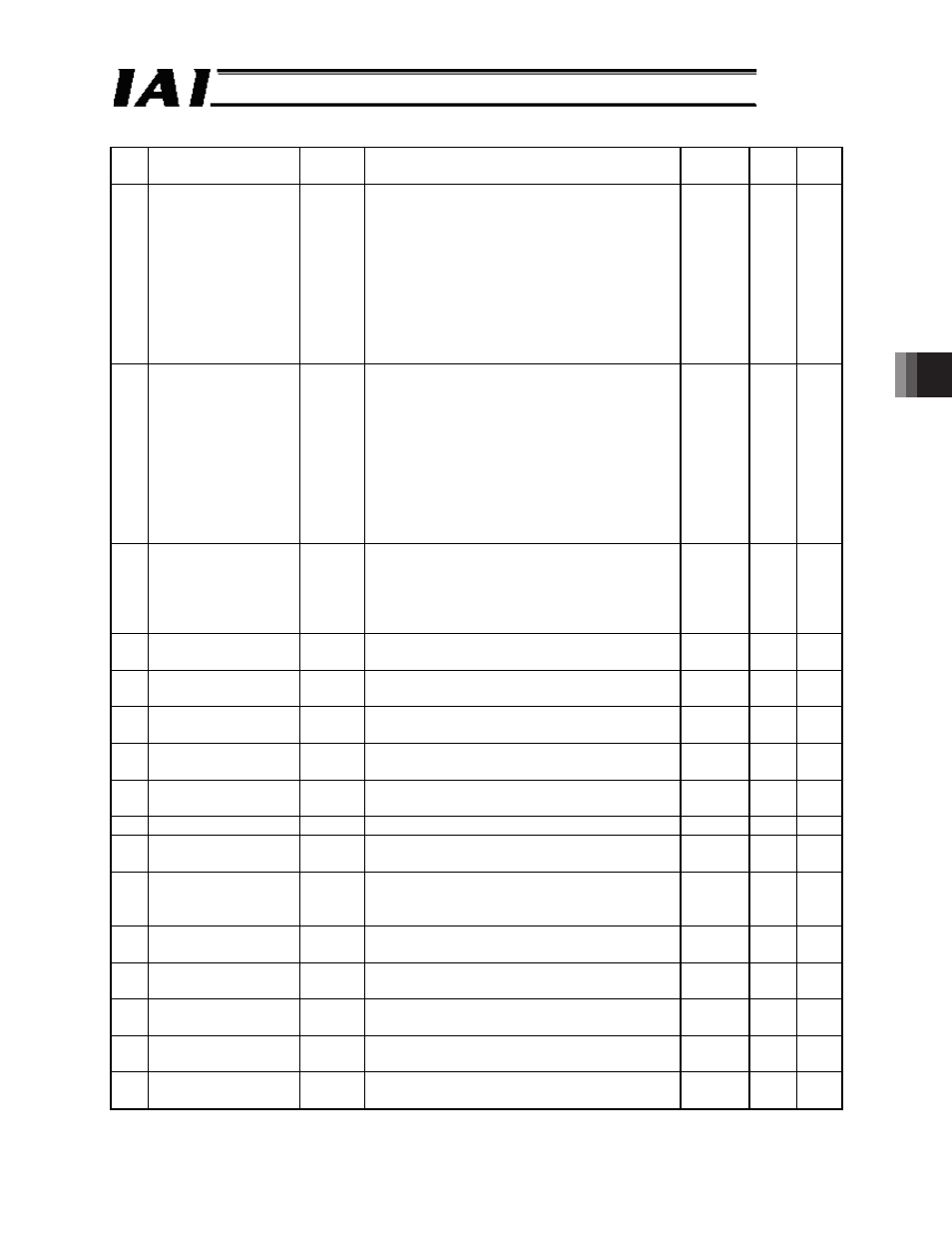
FC
Function
Symbol
Function
Combination
with PIO
Broad-
cast Page
03 Zone status query
ZONS
This function reads the following 6 statuses:
[1] LS2 (PIO pattern solenoid valve mode
[3-point type]
[2] LS1 (PIO pattern solenoid valve mode
[3-point type]
[3] LS0 (PIO pattern solenoid valve mode
[3-point type]
[4] Position zone
[5] Zone 2
[6] Zone 1
{
234
03 Position complete
number query
POSS
This function reads the following 9 statuses:
[1] Position complete number bit 256
[2] Position complete number bit 128
[3] Position complete number bit 64
[4] Position complete number bit 32
[5] Position complete number bit 16
[6] Position complete number bit 8
[7] Position complete number bit 4
[8] Position complete number bit 2
[9] Position complete number bit 1
{
236
03 Controller status
signal read 5
SSSE
This function reads the following 2 statuses:
[1] Cold start level alarm occurred/not
occurred
[2] RTC (calendar) function used/not used
(ERC3, PCON-CA/CFA type only)
{
238
03 Force feedback data
write
FBFC The current measurement on the load cell is
read in units of 0.01 N.
{
240
05 Safety speed mode
switching
SFTY This function issues a command to
enable/disable the safety speed.
{
244
05 Servo ON/OFF
SON This function issues a command to turn the
servo ON/OFF.
{
246
05 Alarm reset
ALRS This function issues a command to reset
alarms/cancel the remaining travel.
{
248
05 Brake release
BKRL This function issues a command to forcibly
release the brake.
{
250
05 Pause
STP This function issues a pause command.
{
252
05 Home return
HOME This function issues a home return operation
command.
{
254
05 Teaching mode
command
CSTR
This function turns the start signal ON/OFF
for movement by position number
specification.
{
256
05 Jog/inch switching
JISL This function switches between the jogging
mode and the inching mode
{
258
05 Teaching mode
command
MOD This function switches between the normal
mode and the teaching mode
{
260
05 Position data load
TEAC This function issues a current position load
command in the teaching mode.
{
262
05 Jog+
JOG+ This function issues a jogging/inching
command in the direction opposite home.
{
264
05 Jog-
JOG- This function issues a jogging/inching
command in the direction of home.
{
266