Modbus – IAI America ROBO Cylinder Series User Manual
Page 307
6. Modbus
ASCII
299
Modbus
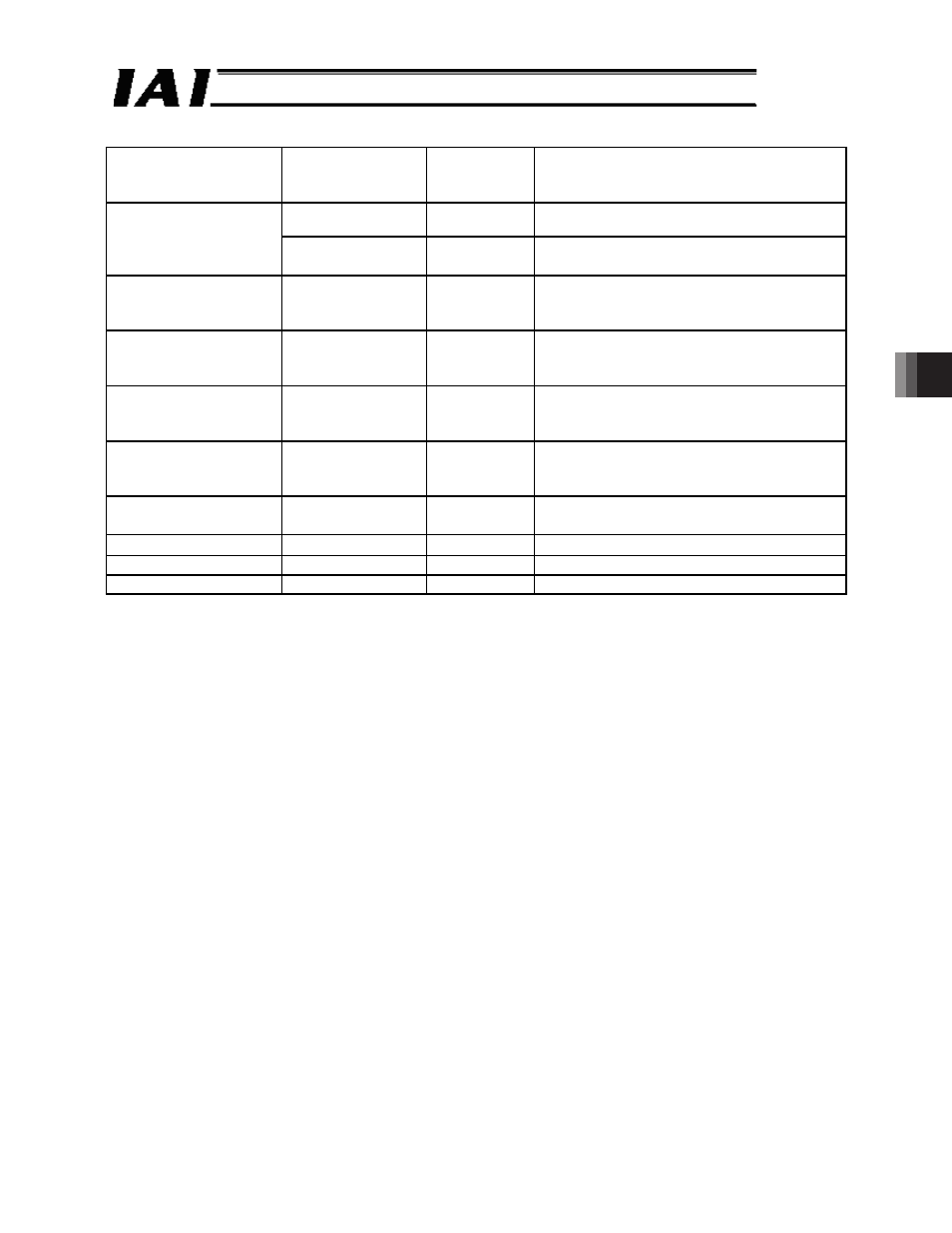
Field
ASCII mode
fixed character
string
Converted
ASCII code
data [H]
Remarks
‘0’, ‘0’, ‘0’, ‘0’
30303030
All upper bits of the 32-bit data are 0.
Changed data 9, 10
(individual zone
boundary -)
Input unit (0.01 mm)
‘0’, ‘F’, ‘A’, ‘0’
30464130
40 (mm) x 100 = 4000 o 0FA0
H
Changed data 11
(acceleration)
Input unit (0.01 G)
‘0’, ‘0’, ‘0’, ‘1’
30303031
0.01 (G) x 100 = 1 o 0001
H
Changed data 12
(deceleration)
Input unit (0.01 G)
‘0’, ‘0’, ‘1’, ‘E’
30303145
0.3 (G) x 100 = 30 o 001E
H
Changed data 13
(push)
Input unit [%]
‘0’, ‘0’, ‘0’, ‘0’
30303030
0 (%) o 0
H
Changed data 14
(threshold)
Input unit [%]
‘0’, ‘0’, ‘0’, ‘0’
30303030
0 (%) o 0
H
Changed data 15
(control flag)
‘0’, ‘0’, ‘0’, ‘0’
30303030
All bits are 0 in the normal operation mode.
0000
b
o
0000
H
Error check
‘E’, ‘E’
4545
LRC check calculation result o EE
H
Trailer
‘CR’, ‘LF’
0D0A
Total number of bytes
79
*1) Calculation of start address
In the example, all data of position No. 12 is changed. Accordingly, the target position address of
position No. 12 is set in the start address field of this query.
1000
H
+ (16 x 12 =192)
H
+ 0
H
= 1000
H
+ C0
H
+ 0
H
= 10C0
H
“10C0” becomes the input value for the start address field of this query.