Modbus – IAI America ROBO Cylinder Series User Manual
Page 52
4. Communicationn
44
Modbus
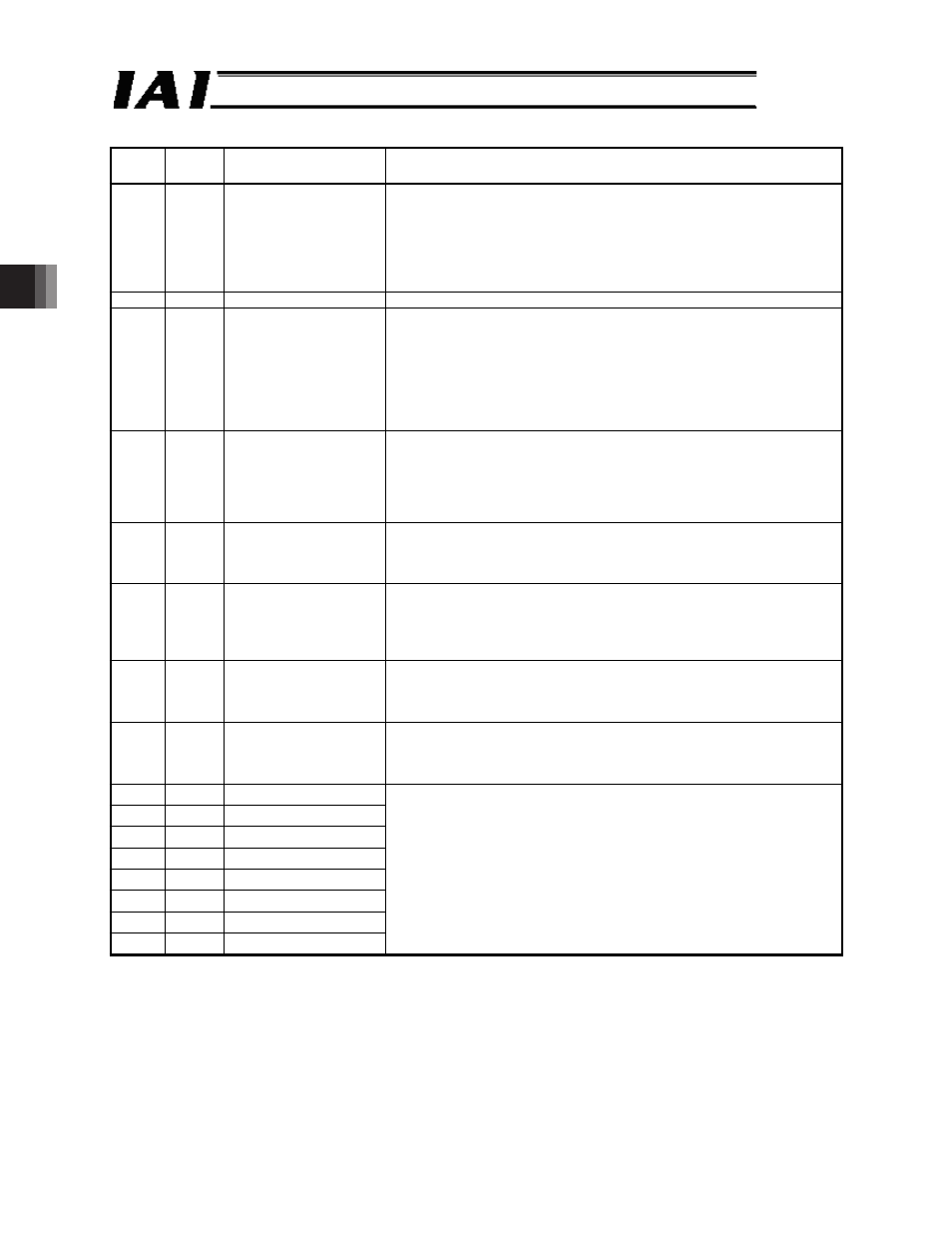
(13) Data of device status register 2 (Address = 9006
H
) (DSS2)
Bit
Symbol
Name
Function
15
ENBS Enable
0: Disable condition(Operation Stop, Servo OFF)
1: Enable condition (normal operation)
It shows the condition of the enable switch when a teaching tool that is
equipped with an enable switch (dead man’s switch) is connected to a
model that has the enable function equipped.
(Note) It is fixed to 1 when in AUTO Mode or for a model without the enable
function being equipped.
14
-
Cannot be used
13
LOAD
Load output judgment
status
0: Normal
1: Load output judgment
If a load current threshold or check range (individual zone boundaries: only
supported by PCON-CF) is set when a movement command is issued, this
bit indicates whether or not the motor current has reached the threshold
inside the check range.
This bit maintains the current value until the next position command is
received.
12
TRQS
Torque level status
0: Normal
1: Torque level achieved
This bit turns 1 when the current has reached a level corresponding to the
specified push torque during a push-motion operation.
Since this bit indicates a level, its status will change when the current level
changes.
11
MODS Teaching mode status
0: Normal operation mode
1: Teaching mode
This bit becomes 1 when the teaching mode is selected by the “teach mode
command bit” of device control register 2.
10
TEAC
Position-data load
command status
0: Normal
1: Position data load complete
Setting the “position-data load command bit” in device control register 2 to 1
will change this bit to 0. This bit will turn 1 once position data has been
written to the EEPROM successfully.
9
JOG+
Jog+ status
0: Normal
1: “Jog+” command active
This bit becomes 1 while the “jog+ command bit” of device control register 2
is selected.
8
JOG-
Jog- status
0: Normal
1: “Jog-“ command active
This bit becomes 1 while the “jog- command bit” of device control register 2
is selected.
7
PE7
Position complete 7
6
PE6
Position complete 6
5
PE5
Position complete 5
4
PE4
Position complete 4
3
PE3
Position complete 3
2
PE2
Position complete 2
1
PE1
Position complete 1
0
PE0
Position complete 0
These bits output a position complete number as a binary value in PIO
pattern 4 or 5 (solenoid valve mode).
Each of these bits turns 1 when the actuator has completed a position
movement and become close enough to the target position by entering the
positioning band according to a position movement command (ST0 to ST7
in device control register 2).
Although the bit turns 0 once the servo is turned OFF, when the servo is
turned ON again the bit will turn 1 if the actuator is still within the positioning
band of the specified command position data.
Moreover, they will become 1 when push-motion is completed or missed in
push-motion operation.