4 various setting before starting communication, Modbus – IAI America ROBO Cylinder Series User Manual
Page 32
3. Specifications
24
Modbus
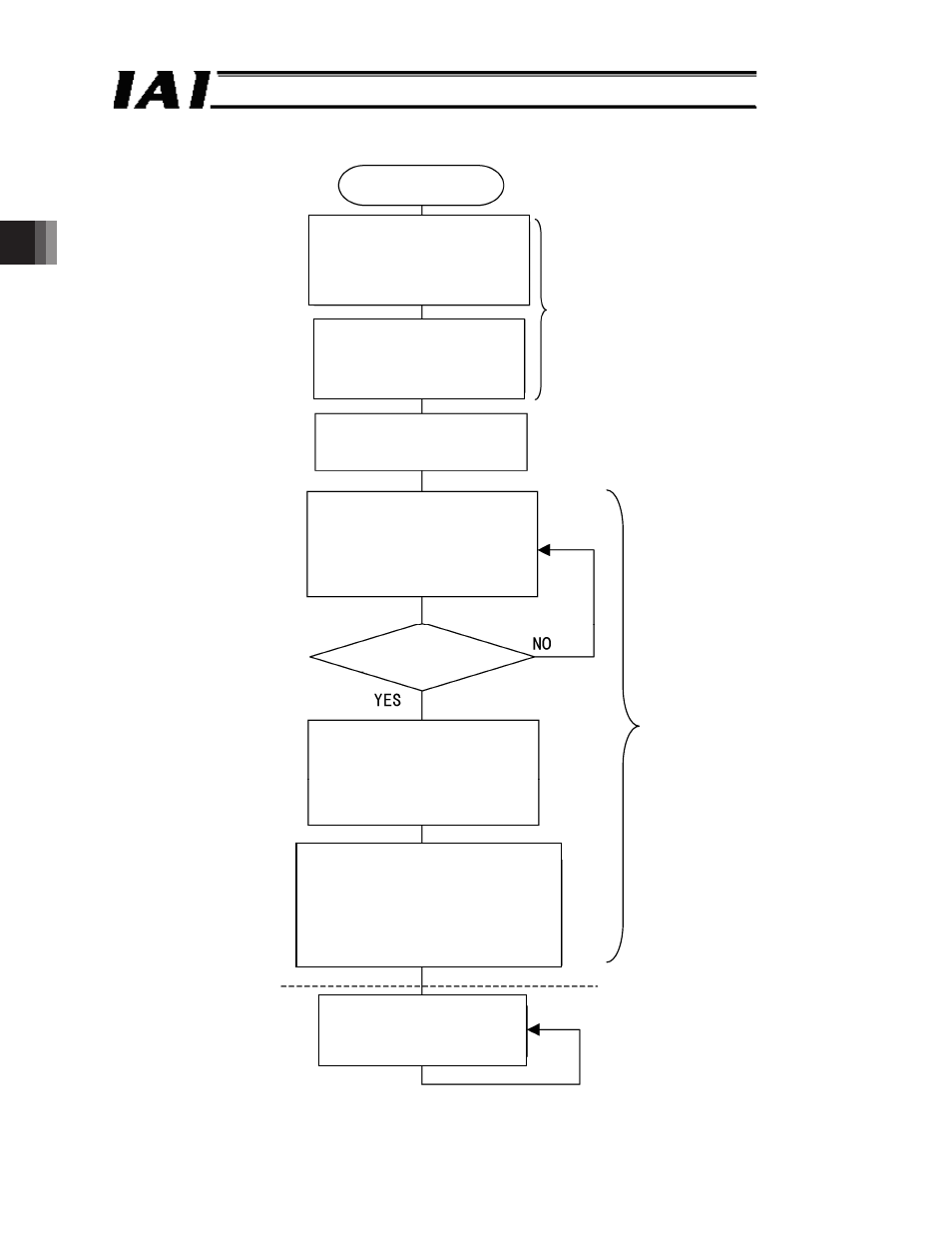
3.4 Various Setting before Starting Communication
Fig. 3.7
If multiple controllers are
connected, set the axis
numbers
[refer to section 3.5].
Set the communication
speed of each controller
[refer to section 3.6].
Completion of wiring
Only necessary to set
once at first launch
Launch the network
(start up the master and
each controller).
Disable PIO startup.
[RTU: Refer to section 5.4.15]
[ASCII: Refer to section 6.5.15]
(Note) Not necessary if
communication is only
used to monitor each
controller
All controllers disabled?
Turn on the servo of the axis to
be activated.
[RTU: Refer to section 5.4.3]
[ASCII: Refer to section 6.5.3]
Return the axis to be activated to
home.
[RTU: Refer to section 5.4.7]
[ASCII: Refer to section 6.5.7]
* Not necessary in case of absolute
specification
Main loop:
Normal processing
(position move, etc.)
m
The setup is complete at this
point. Subsequent steps are
processing steps performed
part of normal operations.