Modbus – IAI America ROBO Cylinder Series User Manual
Page 56
4. Communicationn
48
Modbus
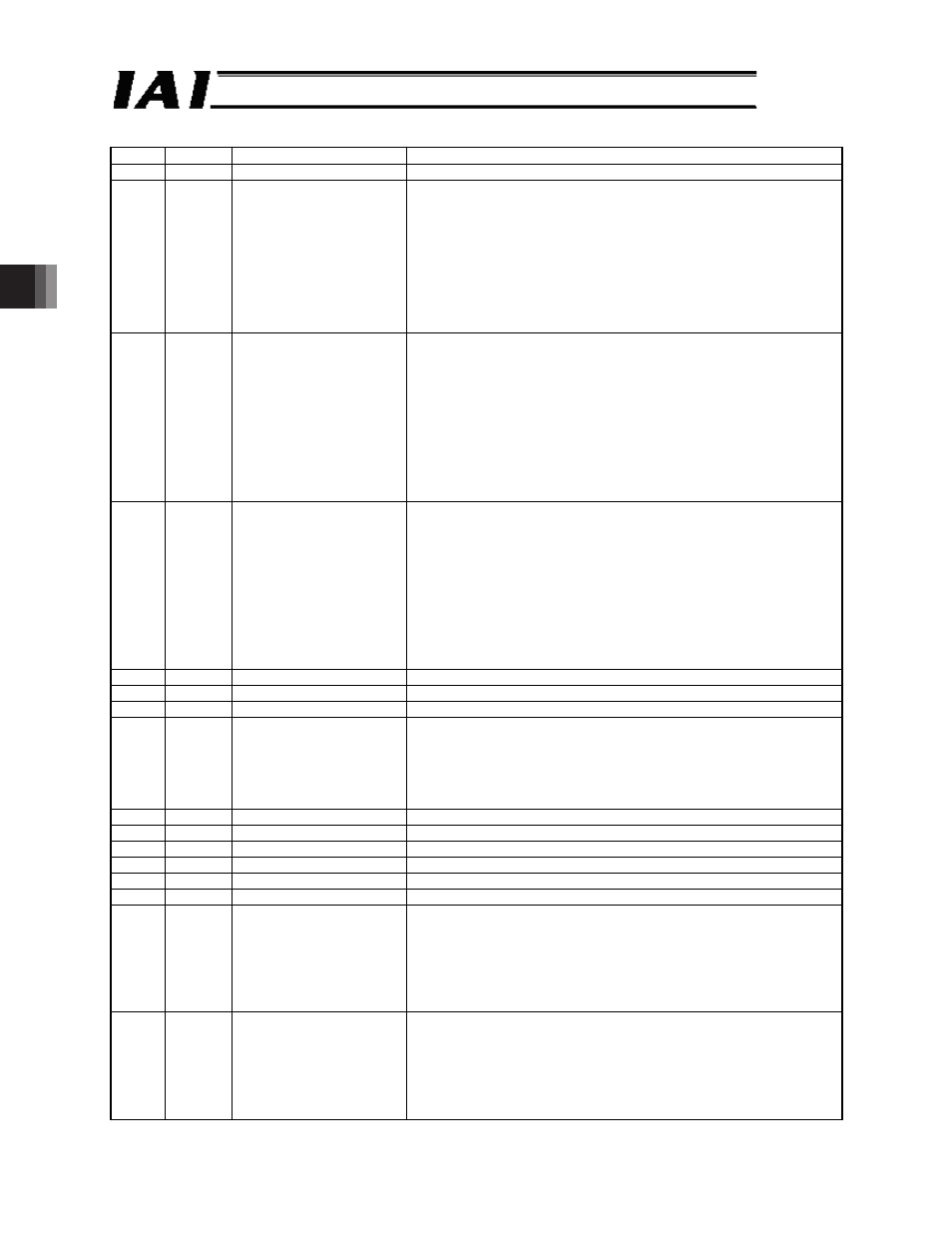
(17) Data of zone status register (Address = 9013
H
) (ZONS)
Bit
Symbol
Name
Function
15
-
Cannot be used
14
LS2
Limit sensor output monitor 2
(PCON-C/CG/CA/CFA,
ACON-C/CG,
SCON
PIO pattern 5)
0: Out of range
1: In range
The negative boundary of the positioning band is obtained by subtracting
the positioning band size from target position No. 2 while the positive
boundary of the positioning band is obtained by adding the positioning
band size to target position No. 2.
This bit will become 1 when the current position is within the band and 0
when it is outside the band.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.
13
LS1
Limit sensor output monitor 1
(PCON-C/CG/CA/CFA,
ACON-C/CG,
SCON
PIO pattern 5)
0: Out of range
1: In range
The negative boundary of the positioning band is obtained by subtracting
the positioning band size from target position No. 1 while the positive
boundary of the positioning band is obtained by adding the positioning
band size to target position No. 1. This bit remains 1 as long as the
current position is within these boundaries.
This bit will become 1 when the current position is within the band and 0
when it is outside the band.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.
12
LS0
Limit sensor output monitor 0
(PCON-C/CG/CA/CFA,
ACON-C/CG,
SCON
PIO pattern 5)
0: Out of range
1: In range
The negative boundary of the positioning band is obtained by subtracting
the positioning band size from target position No. 0 while the positive
boundary of the positioning band is obtained by adding the positioning
band size to target position No. 0. This bit remains 1 as long as the
current position is within these boundaries.
This bit will become 1 when the current position is within the band and 0
when it is outside the band.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.
11
-
Cannot be used
10
-
Cannot be used
9
-
Cannot be used
8
ZP
Position zone output
monitor
0: Out of range
1: In range
This bit remains 1 while the current position is within the zone range
specified for each position and becomes 0 when it is outside the range.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.
7
-
Cannot be used
6
-
Cannot be used
5
-
Cannot be used
4
-
Cannot be used
3
-
Cannot be used
2
-
Cannot be used
1
Z2
Zone output monitor 2
0: Out of range
1: In range
This bit remains 1 while the current position is within the range where the
zone boundary 2 parameter is set and becomes 0 when it is outside the
range.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.
0
Z1
Zone output monitor 1
0: Out of range
1: In range
This bit remains 1 while the current position is within the range where the
zone boundary 1 parameter is set and becomes 0 when it is outside the
range.
This bit becomes effective upon home return completion. It remains
effective even while the servo is OFF.