Modbus – IAI America ROBO Cylinder Series User Manual
Page 53
4. Communication
45
Modbus
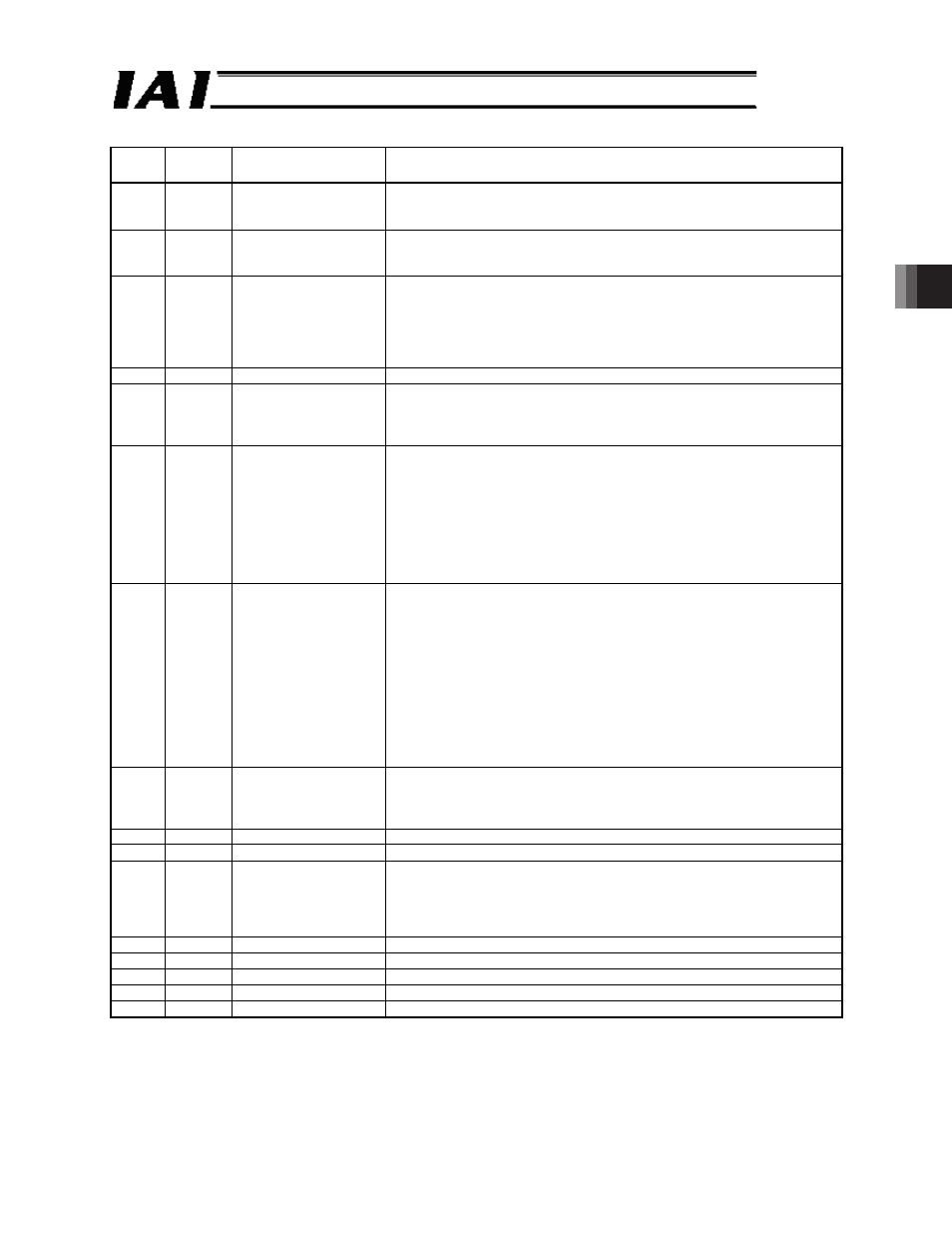
(14) Data of expansion device status register (Address = 9007
H
) (DSSE)
Bit
Symbol
Name
Function
15
EMGP
Emergency stop status 0: Emergency stop input OFF
1: Emergency stop input ON
This bit indicates the status of the emergency stop input port.
14
MPUV
Motor voltage low status 0: Normal
1: Motor drive source cut off
This bit becomes 1 if there is no input from the motor drive power supply.
13
RMDS
Operation mode status 0: AUTO mode
1: MANU mode
This bit becomes 1 when the RC controller is in the MANU mode.
Note that the controller is always in the MANU mode in cases of models not
equipped with an operation mode switch (ERC2, PCON-SE, ACON-SE,
PCON-CY and ACON-CY).
12
-
Cannot be used
11
GHMS
Home return status
0: Normal
1: Home return
This bit remains 1 for as long as home return is in progress. This bit will be 0
in other cases.
10
PUSH
Push-motion operation
in progress
0: Normal
1: Push-motion operation in progress
This bit remains 1 while the actuator is performing a push-motion operation
(excluding an approach operation. It will turn 0 under the following
conditions:
1. The actuator has missed the push motion operation.
2. The actuator has paused.
3. The next movement command has been issued.
4. The servo has turned OFF.
9
PSNS
Excitation detection
status
0: Excitation detection not yet complete
1: Excitation detection complete
PCON/ERC2, ERC3 Series controllers perform excitation detection at the
first servo ON command received after the controller has started. This bit
becomes 1 when excitation detection is completed.
This bit remains 0 if the excitation detection has failed. Even after a
successful detection, the bit will return to 0 when a software reset is
performed.
This bit becomes 1 if pole sensing is performed with the first servo ON
command after startup and the operation is completed in case of ACON
series controllers.
On SCON Series controllers, this bit is always 0.
8
PMSS
PIO/Modbus switching
status
0: PIO commands enabled
1: PIO command disabled
The result of switching according to the PIO/Modbus switching setting
explained in 5.4.16 or 6.5.16, or the current status, is indicated.
7
-
Cannot be used
6
Cannot be used
5
MOVE
Moving signal
0: Stopped
1: Moving
This bit indicates whether or not the actuator is moving (conditions during
home return and push-motion operation included). This bit remains 0 while
the actuator is paused.
4
-
Cannot be used
3
-
Cannot be used
2
-
Cannot be used
1
Cannot be used
0
-
Cannot be used