Modbus – IAI America ROBO Cylinder Series User Manual
Page 158
5. Modbus RTU
150
Modbus
(5) Query sample
Examples of different operations are shown in [1] to [3] below.
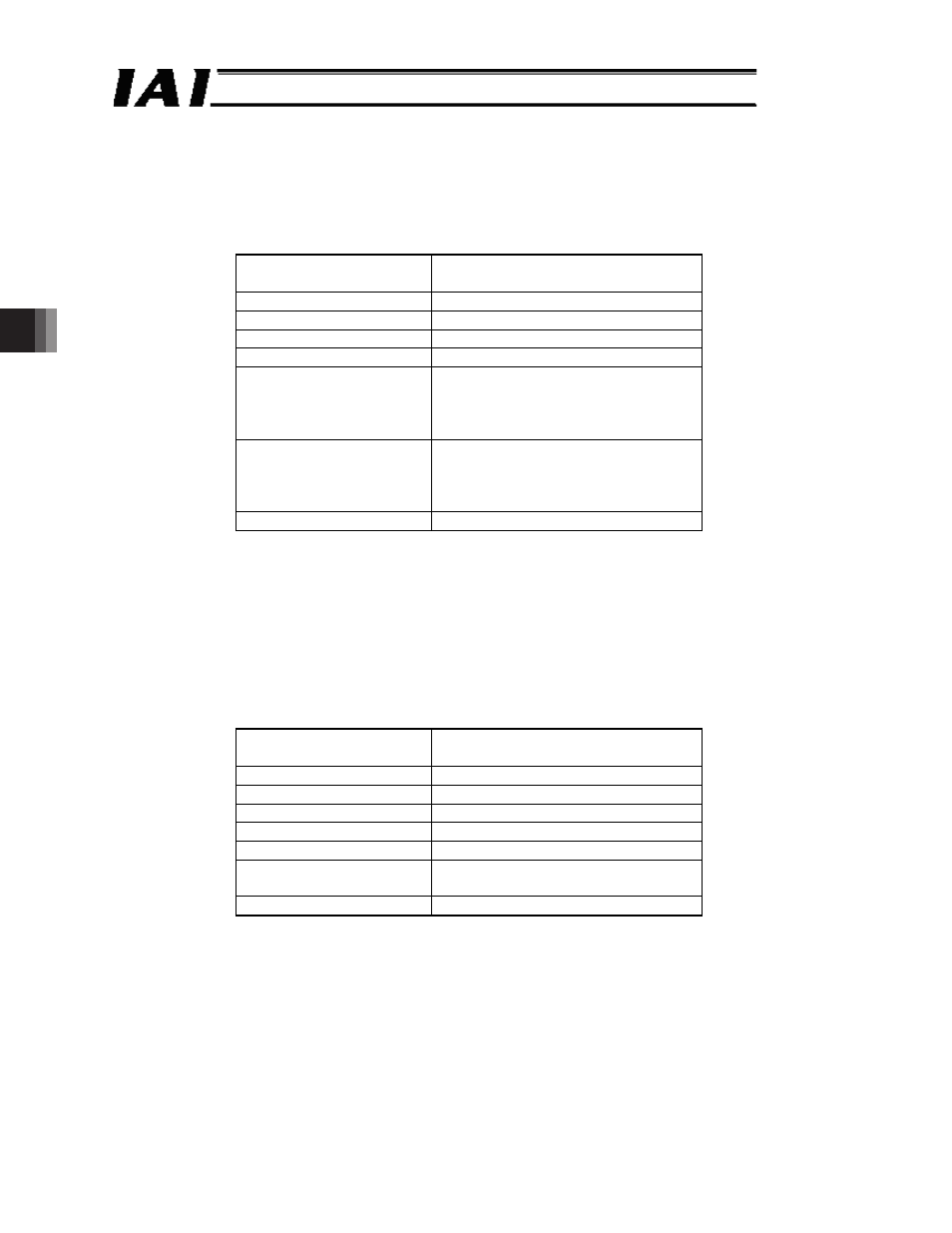
[1] A sample query that turns the servo of a controller of axis No. 0 on and then executes home
return operation is performed.
Query (silent intervals are inserted before and after the query)
First time
01 06 0D 00 10 00 86 A6 --- Servo ON
Second time 01 06 0D 00 10 10 87 6A --- Home return
Field
RTU mode
8-bit data
Start
Silent interval
Slave address [H]
01
Function code [H]
06
Start address [H]
0D00
Changed data [H]
First time: 1000
Second time: 1010
(Keep the servo ON bit 1 in cases
other than when the servo is OFF.)
Error check [H]
First time: 86A6
(in accordance with CRC calculation)
Second time: 876A
(in accordance with CRC calculation)
End
Silent interval
Note 1 Home return is not performed even if 1010
H
is sent to change the data while the
servo is OFF (refer to the timing chart at startup of each RC controller).
Note 2 To keep the previous status, send the previous status even if there is no change.
As in the example above, keep the servo ON bit as 1 at home return as well.
If the change is successful, the response message will be the same as the query.
[2] Move to position No. 1 using the position movement specification register (address 9800
H
).
Before this operation, perform the operation in example [1] above to complete a home return.
Query (Silent intervals are inserted before and after the query.)
01 06 98 00 00 01 67 6A
Field
RTU mode
8-bit data
Start
Silent interval
Slave address [H]
01
Function code [H]
06
Start address [H]
9800
Changed data [H]
0001
Error check [H]
676A (in accordance with CRC
calculation)
End
Silent interval