IAI America ASEL User Manual
Page 395
Appendix
Parameter Utilization
373
Appendix
z
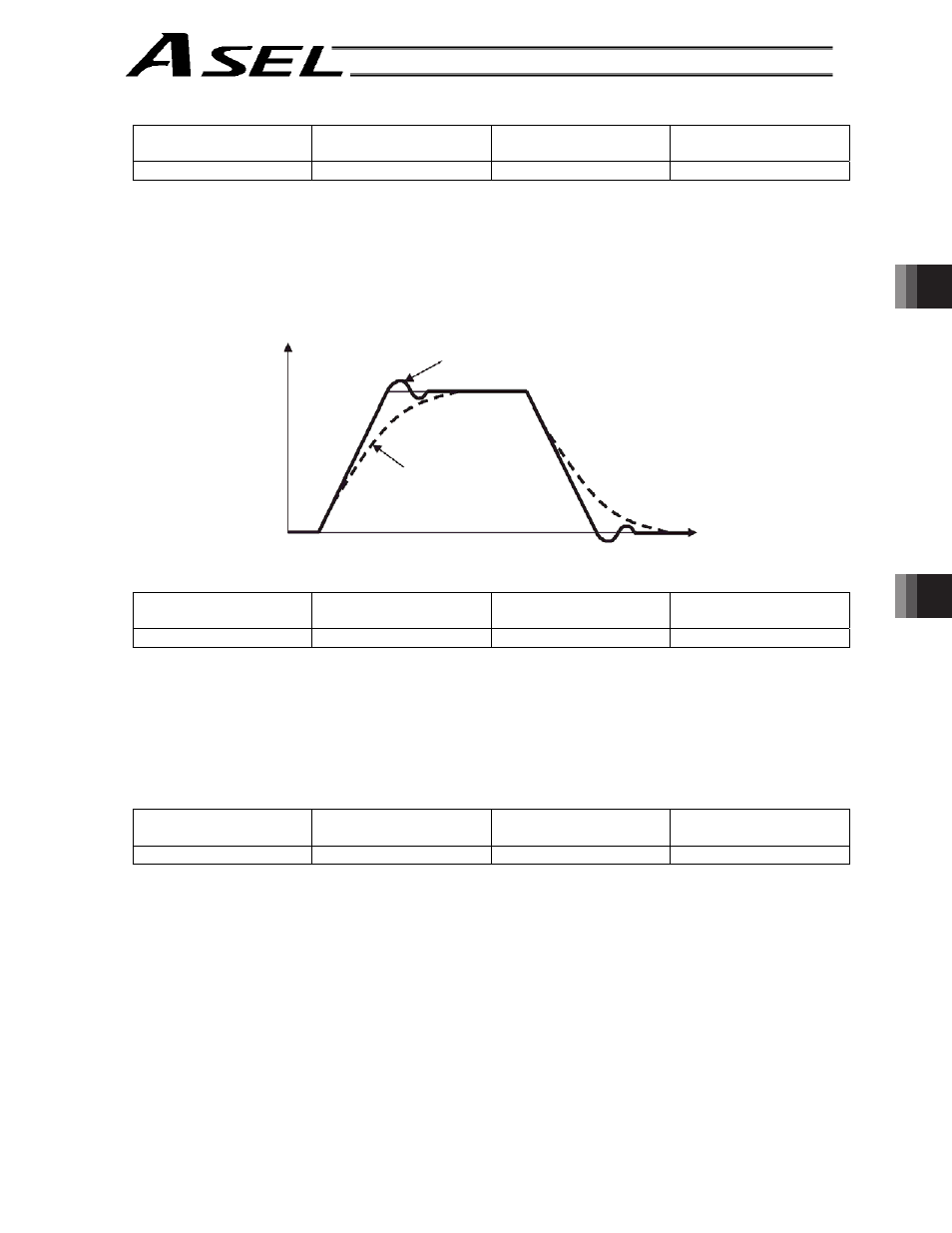
Speed loop integral gain
Driver parameter
number
Unit
Input range
Default value
(reference)
44
---
1 to 3276700
1667
This parameter determines the level of response with respect to a speed control loop.
Decreasing the setting results in lower response to the speed command and decreases the reactive
force upon load change. If the setting is too low, compliance with the position command drops and the
positioning time increases as a result.
Increasing the setting too much increases the tendency of the actuator to overshoot or oscillate,
resulting in increased mechanical vibration.
z
Torque filter time constant
Driver parameter
number
Unit
Input range
Default value
(reference)
45
---
0 to 2500
0
This parameter determines the filter time constant applicable to the torque command.
If the mechanical resonance frequency is equal to or lower than the servo loop response frequency,
the motor will vibrate.
This mechanical resonance can be suppressed by increasing the setting of this parameter.
It should be noted, however, that increasing the setting too much may affect the stability of the control
system.
z
Current control band number
Driver parameter
number
Unit
Input range
Default value
(reference)
46
---
0 to 4
4
This parameter sets the control band of the PI current control system.
Normally the default setting should not be changed.
If this parameter is changed carelessly, stability of the control system may be affected and a very
dangerous situation may occur.
Changing this parameter may be effective in certain situations, such as when resonance noise occurs.
If you wish to change the setting of this parameter, please contact IAI.
Speed
Setting is high (overshoot)
Setting is low
Time