Alphabetical order – IAI America ASEL User Manual
Page 112
Part 2 Programs
Chapter 2 List of SEL
Language Command Codes
90
Part 2 Programs
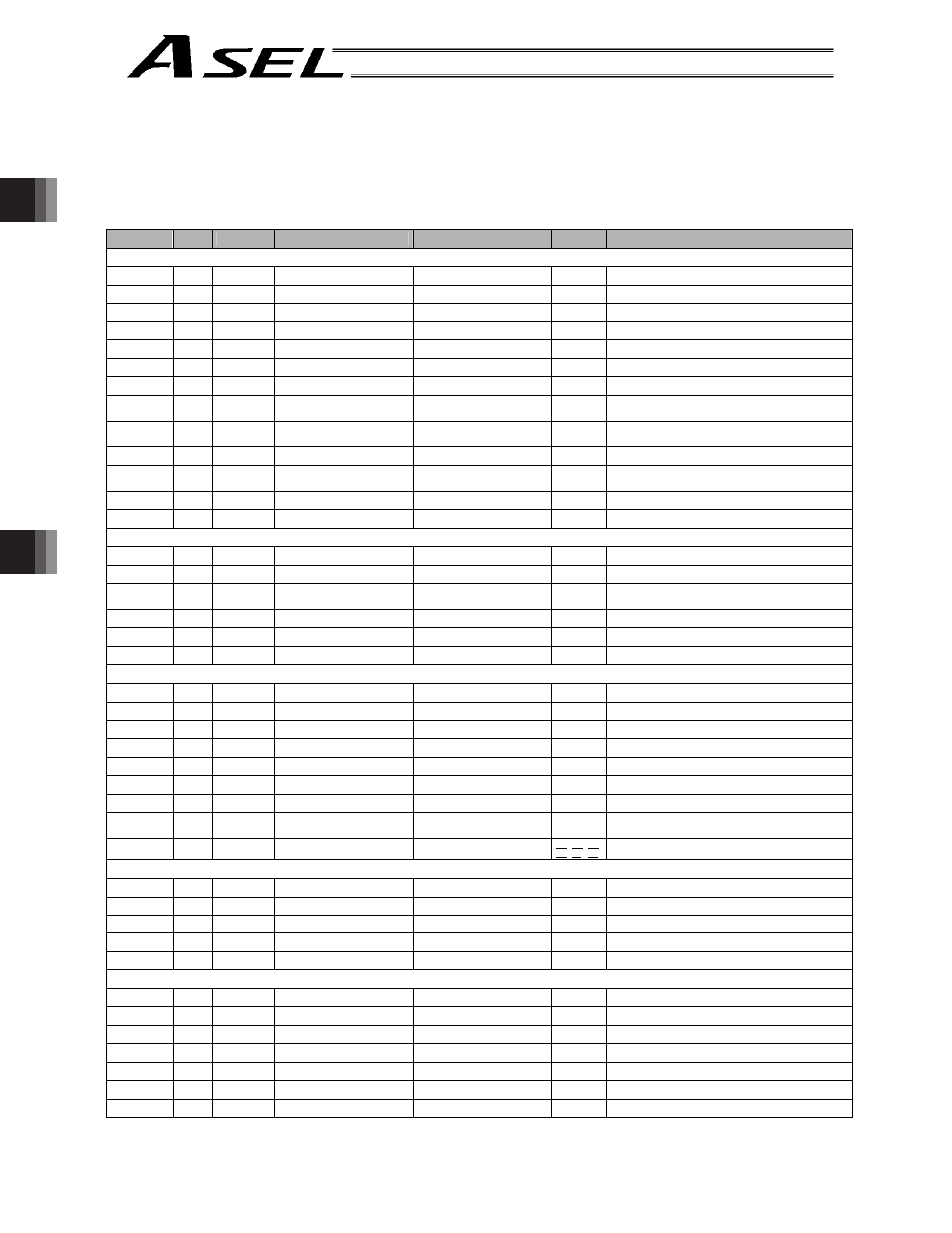
2. Alphabetical Order
Operation type in the output field
CC: Command was executed successfully,
ZR: Operation result is zero, PE: Operation is complete,
CP: Command part has passed, TU: Time up
EQ: Operand 1 = Operand 2, NE: Operand 1 z Operand 2,
GT: Operand 1 > Operand 2, GE: Operand 1 t Operand 2,
LT: Operand 1 < Operand 2, LE: Operand 1 d Operand 2
Command Page Condition
Operand 1
Operand 2
Output
Function
A
ABPG
127 Optional Stop program number
(Stop program number)
CC
Stop other program
ACC
147 Optional Acceleration
Prohibited
CP
Set acceleration
ACHZ
216 Optional Axis number
Prohibited
CP
Declare arch-motion Z-axis
ADD
98
Optional Augend variable
Addend
ZR
Add
AND
104 Optional AND operand variable Operand
ZR
Logical AND
ARC
183 Optional
Passing position number
End position number
PE
Move along arc
ARC2
177 Optional
Passing position number
End position number
PE
Move along arc 2
ARCC
180 Optional Center position number Center angle
PE
Move along arc via specification of center
position and center angle
ARCD
179 Optional End position number
Center angle
PE
Move along arc via specification of end position
and center angle
ARCH
216 Optional Position number
Position number
PE
Arch motion
ATN
102 Optional
Inverse-tangent
assignment operation
Operand
ZR
Inverse tangent
ATRG
219 Optional Position number
Position number
CP
Set arch trigger
AXST
193 Optional Variable number
Axis number
CP
Get axis status
B
BASE
152 Optional Reference axis number Prohibited
CP
Set reference axis
BGPA
221 Optional Palletizing number
Prohibited
CP
Declare start of palletizing setting
BGSR
123
Prohibited
Declaration subroutine
number
Prohibited
CP
Start subroutine
BTPF
113 Optional Output port, flag
Timer setting
CP
Output OFF pulse
BTPN
112 Optional Output port, flag
Timer setting
CP
Output ON pulse
BT
111 Optional Start output, flag
(End output, flag)
CP
Output, flag [ON, OF, NT]
C
CANC
155 Optional (Input port to abort)
(CANC type)
CP
Declare port to abort
CHPR
233 Optional 0 or 1
Prohibited
CP
Change task level
CHVL
178 Optional Axis pattern
Speed
CP
Change speed
CIR
182 Optional
Passing position 1 number Passing position 2 number
PE
Move along circle
CIR2
176 Optional
Passing position 1 number Passing position 2 number
PE
Move along circle 2
CLOS
200 Optional Channel number
Prohibited
CP
Close channel
CLR
97
Optional Start-of-clear variable End-of-clear variable
ZR
Clear variable
COS
101 Optional
Cosine assignment
variable
Operand
ZR
Cosine
CP
107 Optional Comparison variable
Comparison value
EQ NE GT
GE LT LE
Compare
D
DCL
148 Optional Deceleration
Prohibited
CP
Set deceleration
DEG
151 Optional Division angle
Prohibited
CP
Set division angle
DIS
157 Optional Distance
Prohibited
CP
Set spline division distance
DIV
99
Optional Dividend variable
Divisor
ZR
Divide
DW
187 Optional Comparison variable
Comparison value
CP
Loop [EQ, NE, GT, GE, LT, LE]
E
ECMD
235 Optional 1
Axis number
CC
Get motor current value
ECMD
236 Optional 5
Axis number
CC
Get axis operation status
ECMD
237 Optional 20
Variable number
CC
Get parameter value
EDDO
188
Prohibited
Prohibited
Prohibited
CP
Declare end of DO
EDIF
186
Prohibited
Prohibited
Prohibited
CP
Declare end of IF
EDPA
221
Prohibited
Prohibited
Prohibited
CP
Declare end of palletizing setting
EDSL
192
Prohibited
Prohibited
Prohibited
CP
Declare end of SLCT