4 interface circuits, 4 interface circuits - 21, Interface circuits -21 – Yaskawa Sigma II Series Servo System User Manual
Page 59: Reference position input circuit
Sigma II User’s Manual
Chapter 3: Wiring
3 - 21
3.4.4
Interface Circuits
This section shows examples of servo amplifier I/O signal connection to the host
controller.
Interface for Reference Input Circuits
Analog Input Circuit
Analog signals are either speed or torque reference signals at the impedance below.
•
Speed reference input: About 14k
Ω
•
Torque reference input: About 14k
Ω
The maximum allowable voltage for input signals is ±12V.
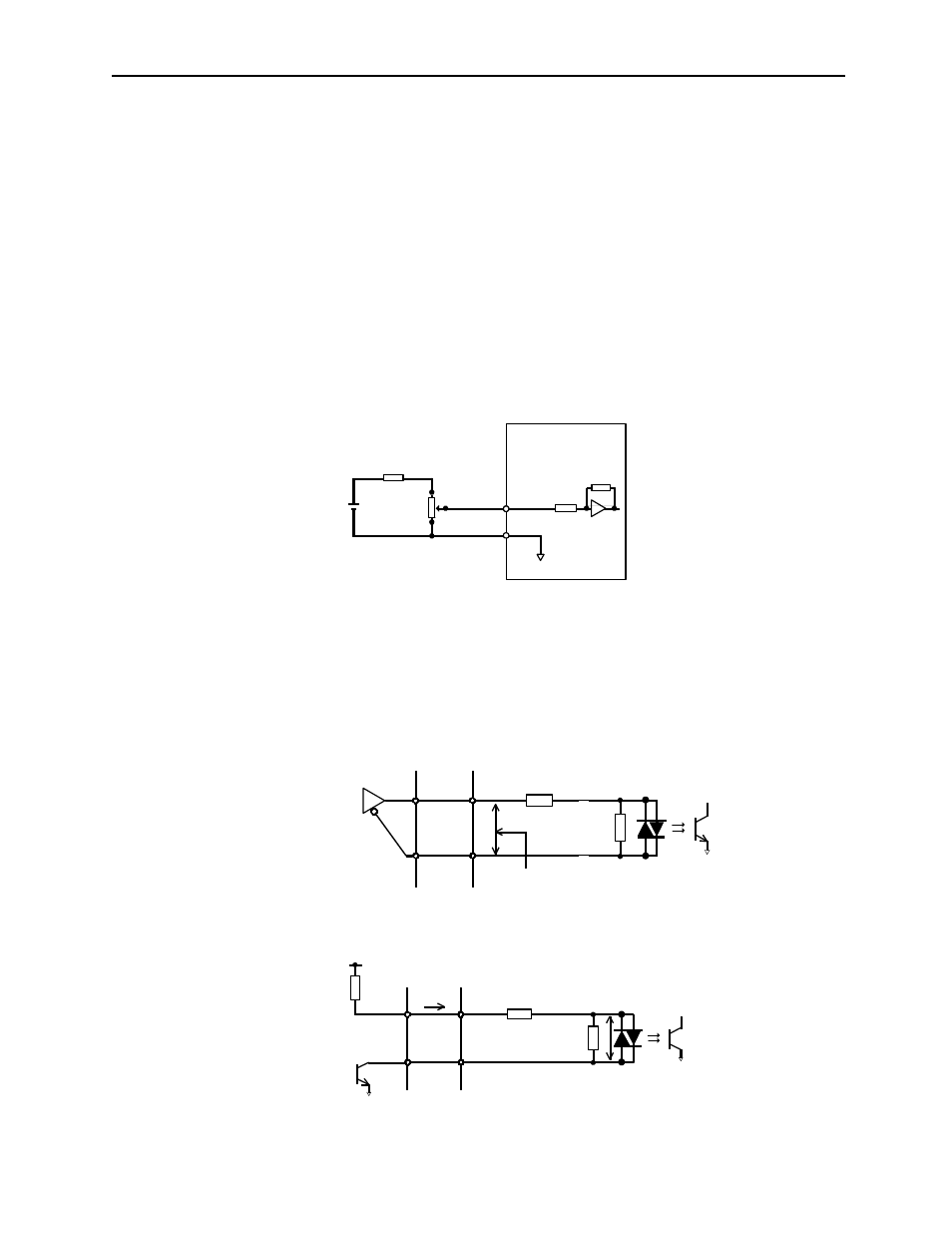
Reference Position Input Circuit
An output circuit for the reference pulse and error counter clear signal at the host
controller can be either line-driver or open-collector outputs. These are shown
below by type.
•
Line-driver Output Example:
•
Open-collector Output, Example 1: External power supply
12V
25-HP-10B
3
1
2
1000:1
0V
SG
Servo Amplifier
V-REF or
T-REF
1.8k
Ω (½W) minimum
2k
Ω
About 14k
Ω
Applicable line-driver
SN75174 manufactured by
TI, or the equivalent
Servo amplifier end
Host controller end
150
Ω 4.7kΩ
2.8V
≤ (High level) - (Low level) ≤ 3.7V
VF = 1.5 to 1.8V
Tr1
R1
i
Servo amplifier end
Host
controller end
150
Ω 4.7kΩ