8 torque feed-forward function, 8 torque feed-forward function - 44, Torque feed-forward function -44 – Yaskawa Sigma II Series Servo System User Manual
Page 130: Using the torque feed-forward function
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 44
5.2.8
Torque Feed-Forward Function
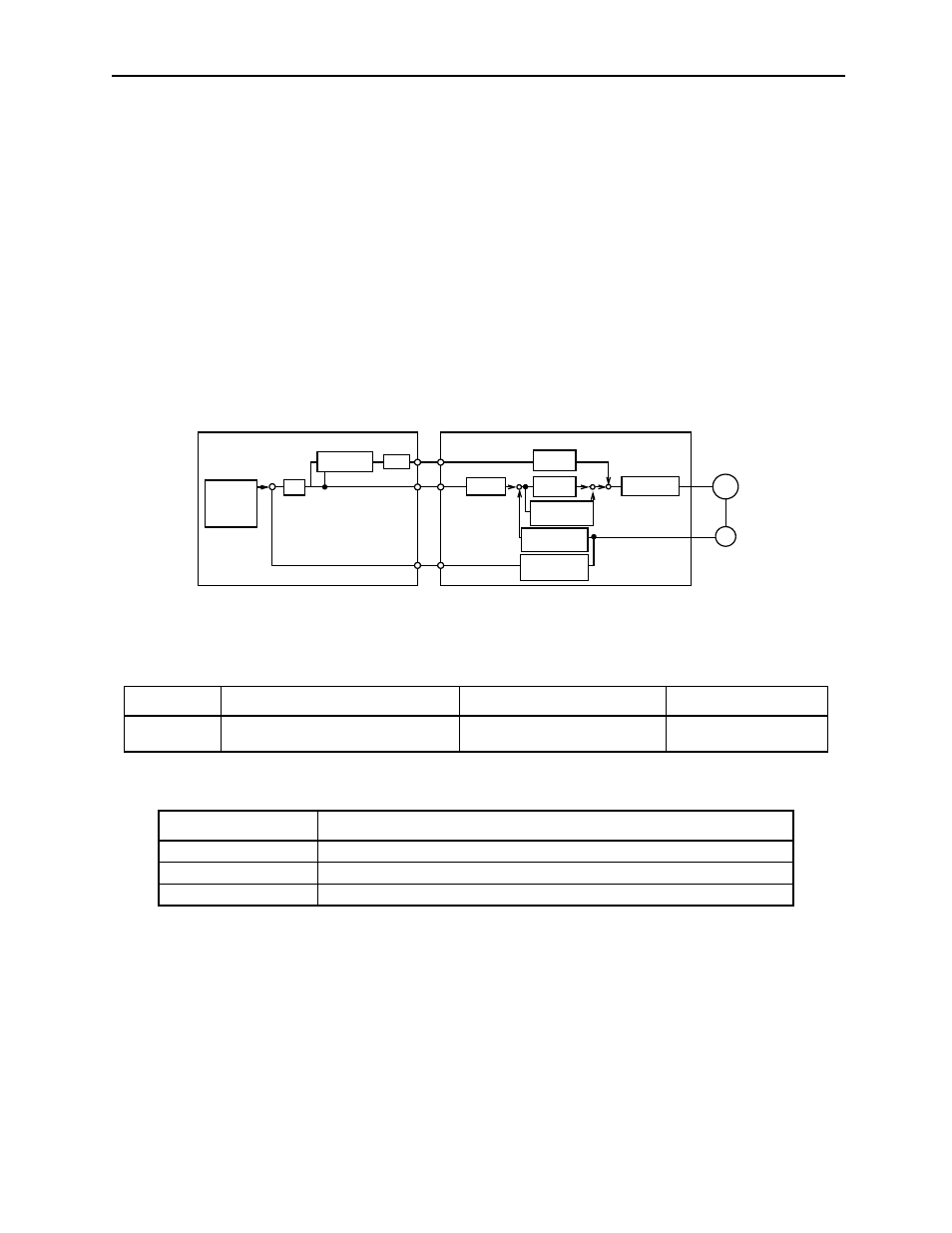
The torque feed-forward function is used only in speed control (analog reference).
This function is used to:
•
Shorten positioning time.
•
Differentiate a speed reference at the host controller to generate a torque
feed-forward reference.
•
Input this reference together with the speed reference to the servo amplifier.
Too high a torque feed-forward value will result in an overshoot or an undershoot.
To prevent this, set the optimum value while closely observing the system response.
Connect a speed reference signal to V-REF (CN1-5 and 6) and a torque feed-forward
reference signal to T-REF (CN1-9 and 10).
Using the Torque Feed-Forward Function
To use the torque feed-forward function, set the following parameter to 2.
This setting enables the torque feed-forward function.
The torque feed-forward function cannot be used with the torque limiting by analog
voltage reference function described in 5.2.10 Torque Limiting by Analog Voltage
Reference.
Parameter
Signal
Setting
Control Mode
Pn002.0
Speed Control Option
(T-REF Terminal Allocation)
Default Setting: 0
Speed/Torque Control
Pn002.0 Setting
T-REF Function
0
None.
1
T-REF terminal used for external torque limit input.
2
T-REF terminal used for torque feed-forward input.
Current loop
Integration
Servomotor
Encoder
M
PG
(Pn101)
Speed
calculation
Divider
KFF
Differential
Kp
Position
Reference
T-REF
V-REF
Host controller
SGDH Servo amplifier
+
+
+
+
+
-
+
-
Pn400
Pn100