5 absolute encoder reception sequence, 5 absolute encoder reception sequence - 105, Absolute encoder reception sequence -105 – Yaskawa Sigma II Series Servo System User Manual
Page 191: Outline of absolute signals, Contents of absolute data
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-105
5.7.5
Absolute Encoder Reception Sequence
The sequence in which the servo amplifier receives data from the absolute encoder
and transmits them to the host device is shown below.
Be sure you understand this section when designing the host device.
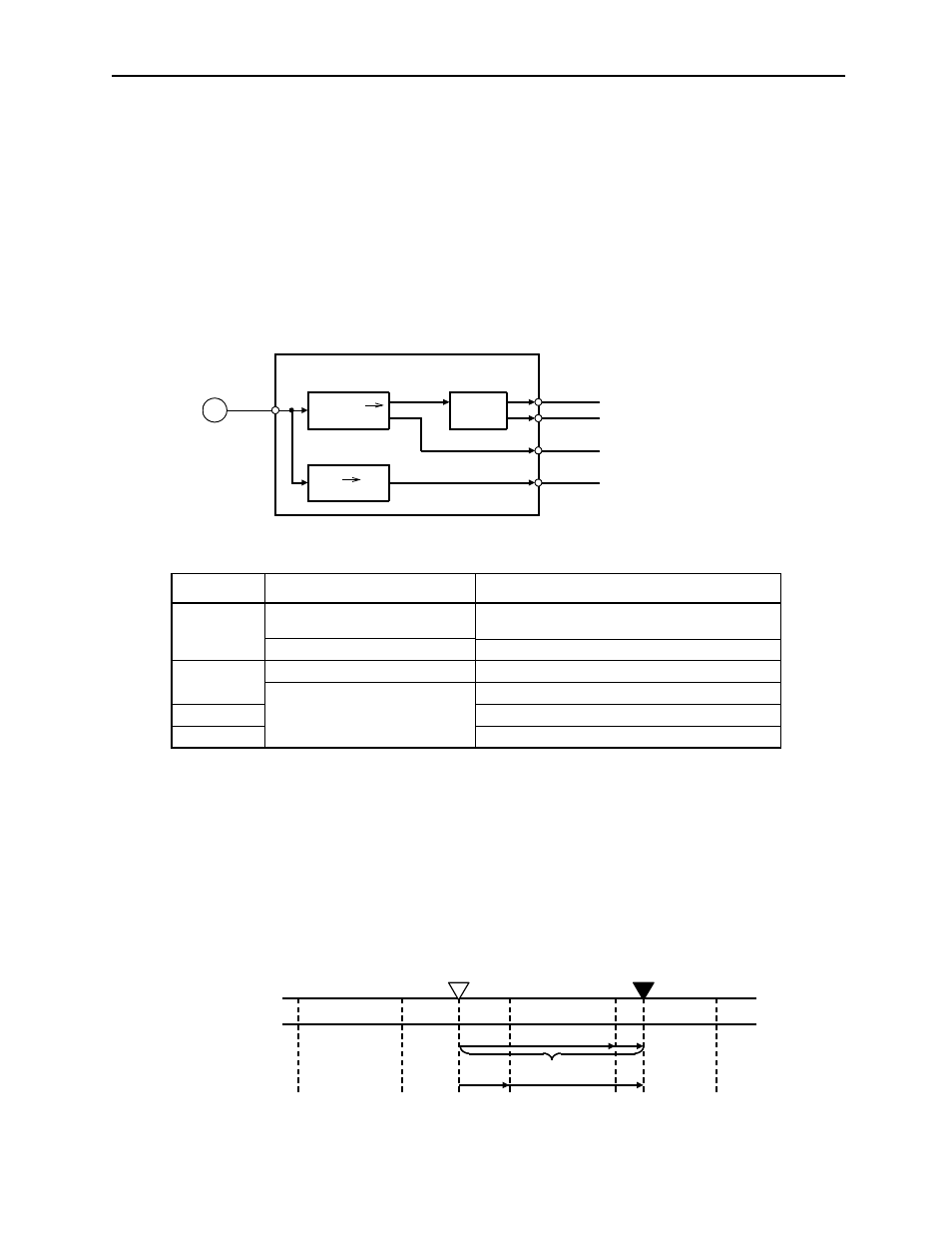
Outline of Absolute Signals
The absolute encoder’s outputs are PAO, PBO, PCO, and PSO signals as shown
below.
Contents of Absolute Data
•
Serial data: Indicates how many turns the motor shaft has made from the
reference position (position specified at setup).
•
Initial incremental pulse: Outputs pulses at the same pulse rate as when the
motor shaft rotates from the home position to the current position at
approximately 2500rpm (for 16 bits when the dividing pulse is at the default
setting).
Signal
Status
Contents
PAO
Initial State
Serial data
Initial incremental pulse
Normal State
Incremental pulse
PBO
Initial State
Initial incremental pulse
Normal State
Incremental pulse
PCO
Home position pulse
PSO
Rotation count serial data
Servo amplifier
PS
PAO
PBO
PCO
PSO
PG
Serial data
pulse conversion
Data data
conversion
Dividing
circuit
(Pn201)
Coordinate value
Value M
Reference position (setup)
-1
0
+1
+2
+3
+3
Current position
+2
+1
+0
PM
PE
PS
PO
M
× R