7 using torque control, 7 using torque control - 37, Using torque control -37 – Yaskawa Sigma II Series Servo System User Manual
Page 123: Torque control selection
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 37
pulse reference output from the host controller after a positioning completed signal is output from the
servo amplifier.
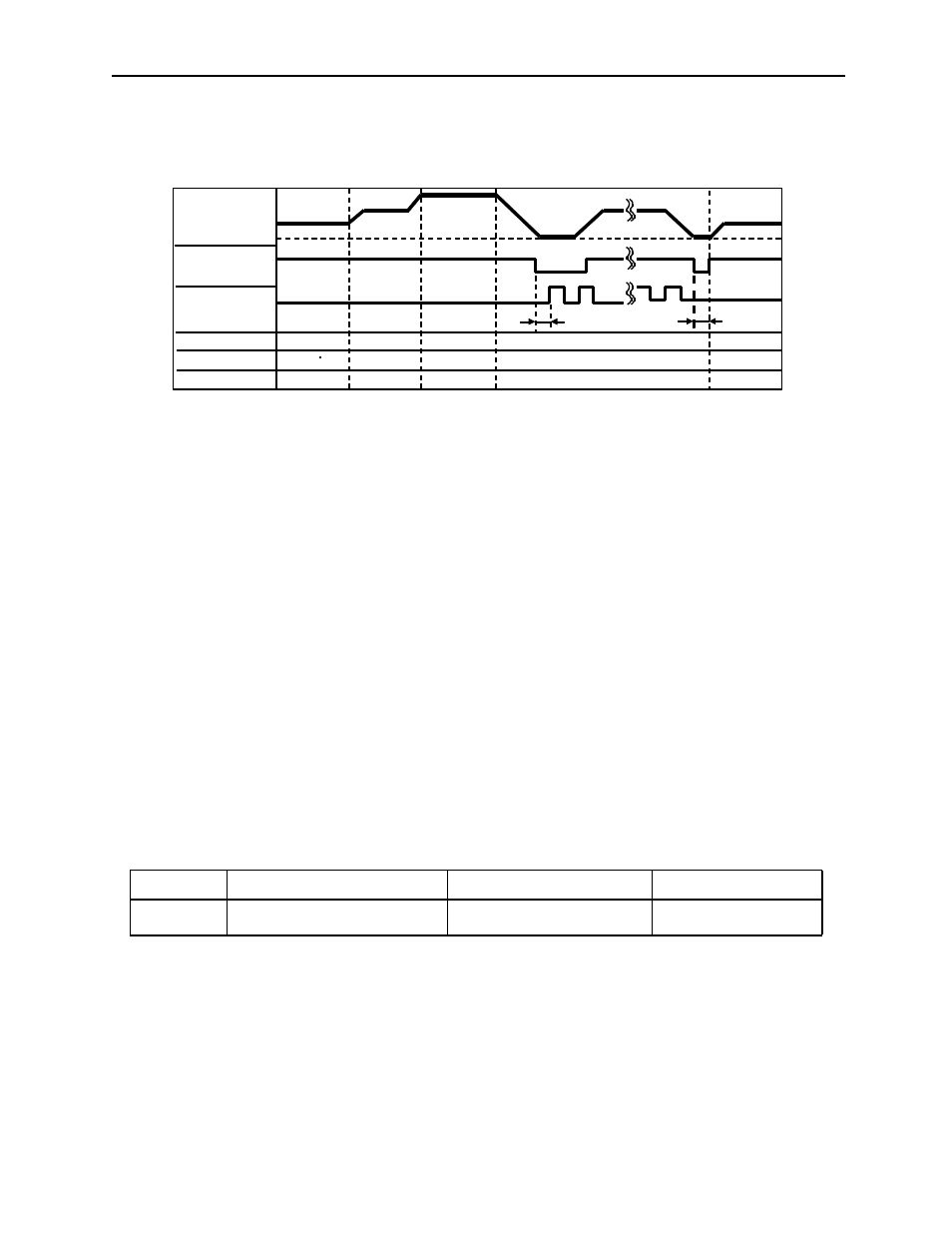
1. The above figure illustrates signal generation timing when the soft start function is used.
2. The value of t1 is not affected by the use of the soft start function. A maximum 2ms delay
occurs when the /PC-L(/SPD-A) or /N-CL(/SPD-B) signal is read.
5.2.7
Using Torque Control
The SGDH servo amplifier limits torque as shown below.
•
Level 1: Limits maximum output torque to protect the equipment or workpiece.
•
Level 2: Limits torque after the Servomotor moves the equipment to a specified
position (internal torque limit).
•
Level 3: Controls torque output rather than speed output.
•
Level 4: Switches between speed and torque control.
The following describes uses for levels 3 and 4 in the torque control function.
Torque Control Selection
Set the following parameter to select the type of control described in levels 3 and 4.
For further explanation of settings, See Appendix B.2 Switches.
A torque reference is entered from the host controller to the servo amplifier in order
to control torque.
Parameter
Signal
Setting
Control Mode
Pn000.1
Control Method Selection
Default Setting: 0
Speed/Torque Control,
Position Control
t1 > 2ms
/N-CL (/SPD-B)
/P-CL (/SPD-A)
ON
Speed 1
Selected Speed
ON
OFF
ON
OFF
OFF
OFF
Pulse reference
ON
OFF
ON
/COIN
Pulse
Reference
0rpm
Motor Speed
t1
Signal Generation Timing for Position Control
t1
Speed 2
Speed 3
Speed 1