Yaskawa Sigma II Series Servo System User Manual
Page 154
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5-68
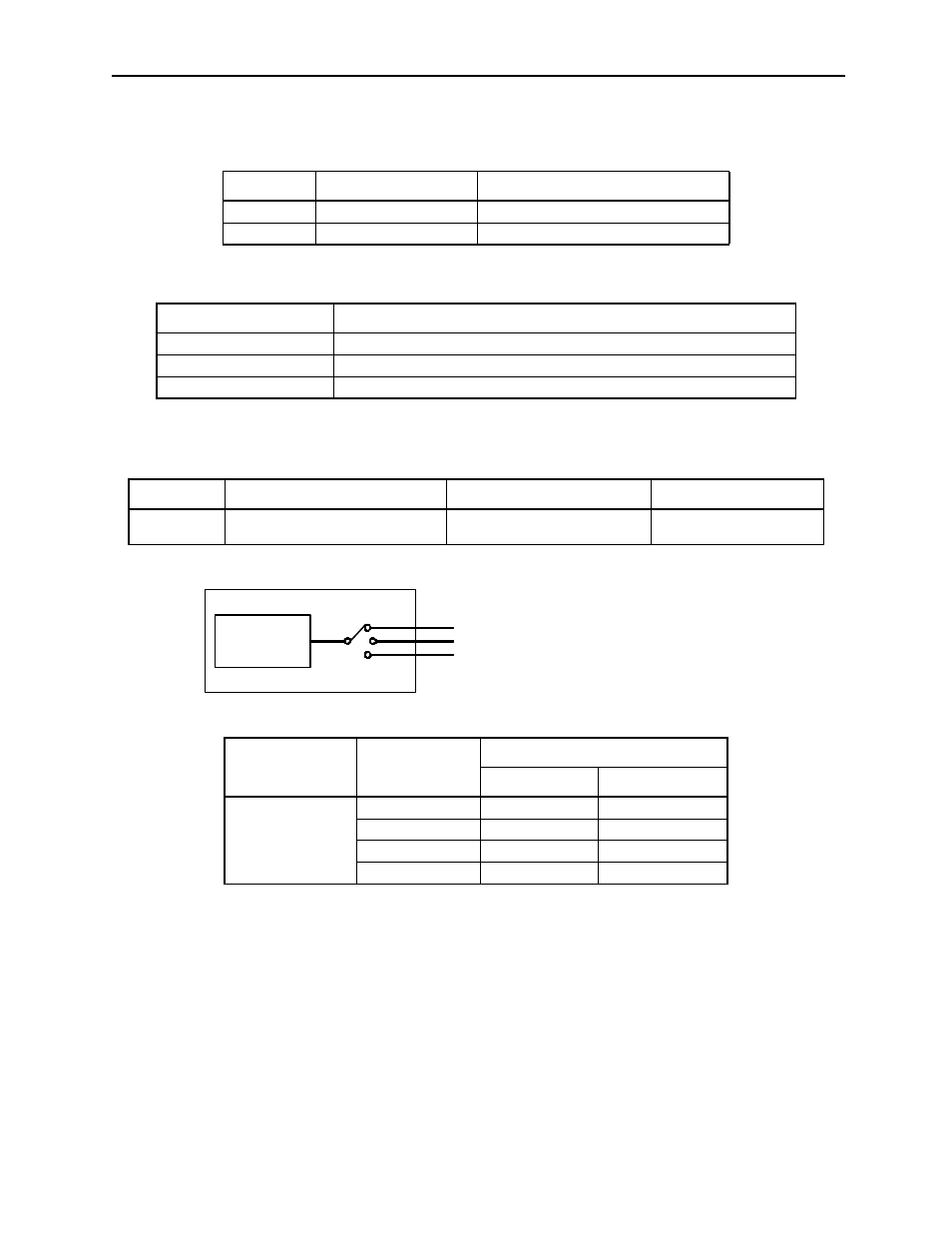
This output signal controls the brake when using a servomotor with a brake and does
not have to be connected when using a servomotor without a brake.
Related Parameters
The following parameter must be selected to determine the location of the output
signal, when the /BK signal is used.
Select the /BK output terminal.
Note: Signals are output with OR logic when multiple signals are allocated to the same output circuit.
Set other output signals to a value other than that allocated to the /BK signal in order to output the
/BK signal alone. See 5.3.4 Output Circuit Signal Allocation.
State
Status
Result
ON:
Closed or low level
Releases the brake.
OFF:
Open or high level
Applies the brake.
Parameter
Description
Pn506
Time Delay from Brake Reference until Servo OFF
Pn507
Speed Level for Brake Reference Output during Motor Operation
Pn508
Timing for Brake Reference Output during Motor Operation
Parameter
Signal
Setting
Description
Pn50F
Output Signal Selections 2
Default Setting: 0000
Speed/Torque Control,
Position Control
Parameter
Setting
Output Terminal (CN1)
1
2
Pn50F.2
0
—
—
1
25
26
2
27
28
3
29
30
Pn50F.2
1
2
3
CN1-25, 26 (SO1)
CN1-27, 28 (SO2)
CN1-29, 30 (SO3)
Input terminals
/BK
Brake interlock
output