Yaskawa Sigma II Series Servo System User Manual
Page 115
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 29
number of encoder signal pulses (A and B phase) output from the servo amplifier.
3. Determine the reference unit used.
A reference unit is the minimum position data unit used to move a load.
(Minimum unit of reference from the host controller).
Examples (in mm):
•
Reference unit can be 0.1in or 0.01in or 0.01mm or 0.001mm, etc.
A reference unit of one pulse moves the load by one reference unit.
•
When the reference unit is 1µm
If a reference of 50000 units is input, the load moves 50mm (1.97in)
(50000
× 0.001mm = 50mm).
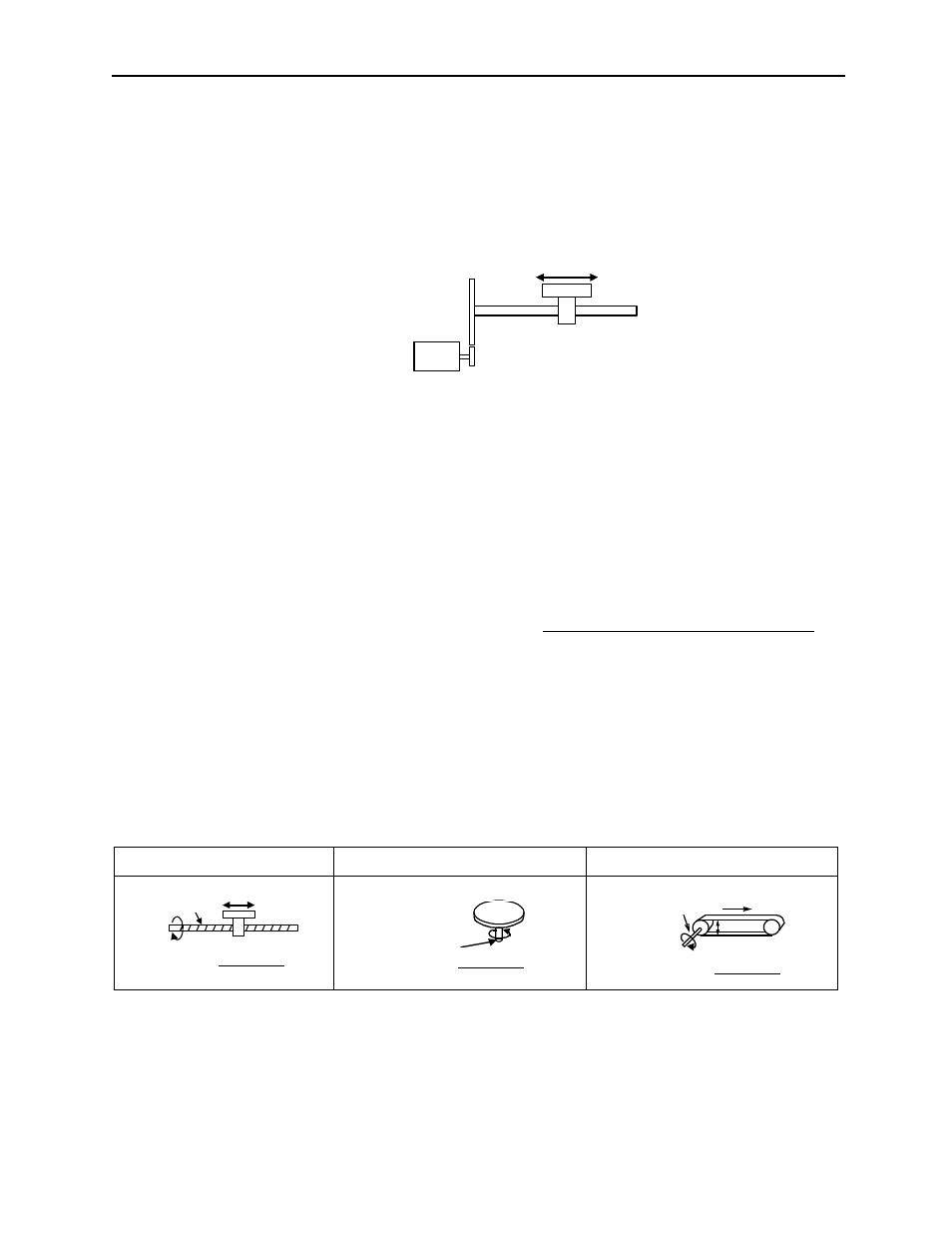
4. Determine the load travel distance per load shaft revolution in reference units.
•
When the ball screw pitch is 0.20in (5mm) and the reference unit is
0.00004in (0.001mm),
Ball Screw
Disc Table
Belt and Pulley
Reference unit: 0.001mm
Determine the reference unit according to
equipment specifications and positioning accuracy.
To move a table in 0.001mm units
Travel distance per load shaft revolution = Travel distance per load shaft revolution
Reference Unit
0.20
0.00004
---------------------
5000
=
(reference units)
Load shaft
P
1 revolution =
P
reference unit
P: Pitch
L d h ft
Load shaft
1 revolution =
360°
reference unit
1 revolution =
πD
reference unit
D: Pulley
πΔ
Load shaft