9 speed feed-forward function, 9 speed feed-forward function - 45, Speed feed-forward function -45 – Yaskawa Sigma II Series Servo System User Manual
Page 131: Setting
Sigma II User’s Manual
Chapter 5: Parameter Settings and Functions
5 - 45
Setting
Torque feed-forward is set using parameter Pn400.
The default setting at Pn400 is 30. If, for example, the torque feed-forward value is
±3V, then torque is limited to ±100% of the rated torque.
5.2.9
Speed Feed-Forward Function
The speed feed-forward function uses analog voltages and is effective only for
position control. This function is used to:
•
Shorten positioning time.
•
Differentiate a position reference at the host controller to generate a speed
feed-forward reference.
•
Input this reference together with the position reference to the servo amplifier.
Too high a speed feed-forward value will result in either overshoot or undershoot.
To prevent this, set the optimum value while closely observing the system response.
Connect a position reference signal to PULS and SIGN (CN1-7, 8, 11, and 12) and a
speed feed-forward reference signal to V-REF (CN1-5 and 6).
Parameter
Signal
Setting
(0.1V/Rated Torque)
Control Mode
Pn400
Torque Reference Input Adjustment Factor
Setting Range: 0 to 100
Default Setting: 30
Speed/Torque Control
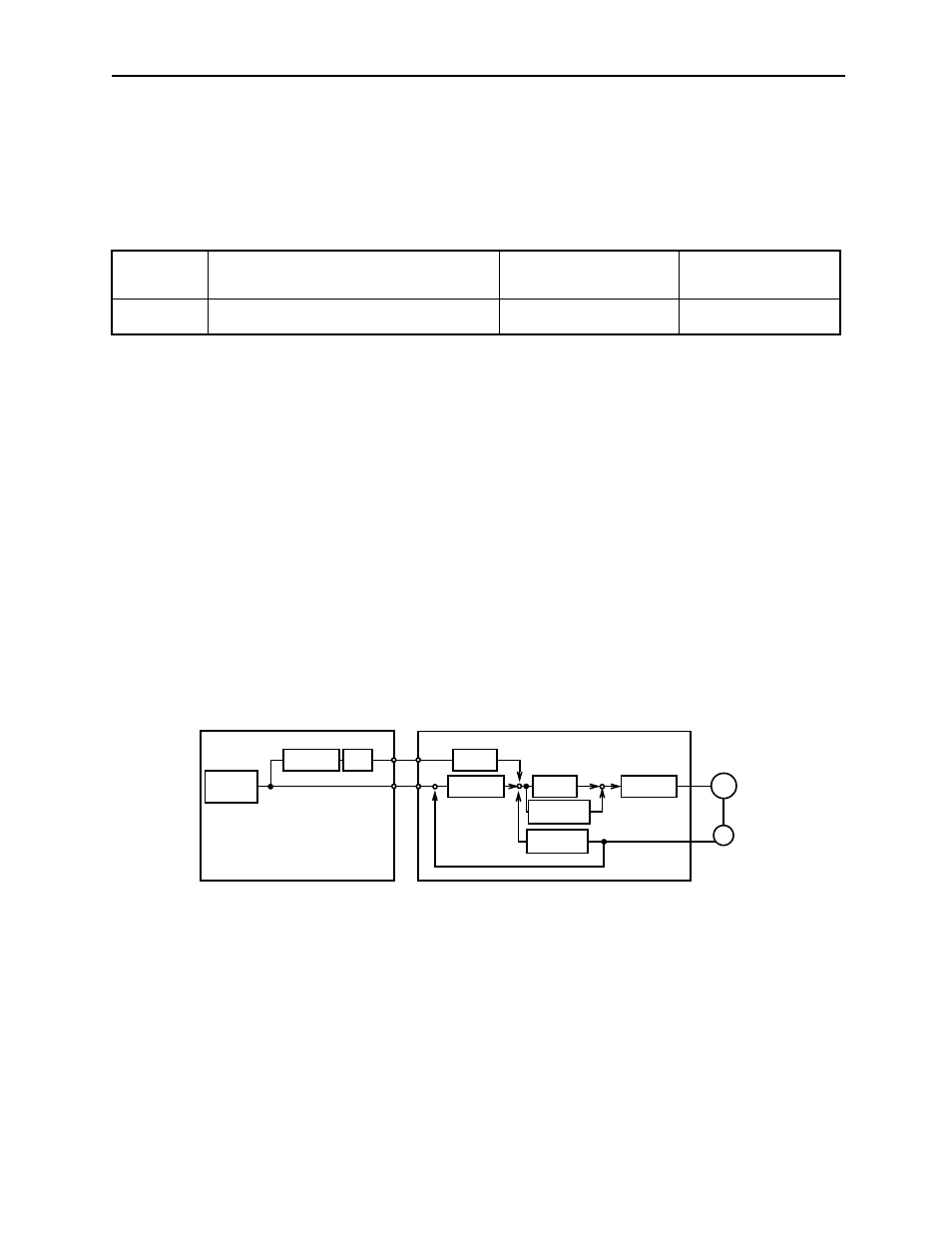
Position
reference
V-REF
Kp (Pn102)
Differential K
FF
Pn300
SGDH Servo amplifier
Host controller
Integration
Pn100
(Pn101)
Speed
calculation
Current loop
PG
M
Servomotor
Kp: Position loop gain
K
FF
: Feed-Forward gain