2 resolver, 3 sincos encoder, 4function description – Pilz PMCtendo DD5.03/000/0/0/0/110-230VAC User Manual
Page 50: 3 control element
4.3
Control element
4
Function description
Pilz GmbH & Co. KG, Felix-Wankel-Straße 2, 73760 Ostfildern, Germany
Telephone: +49 711 3409-0, Telefax: +49 711 3409-133, E-Mail: [email protected]
4-22
4.3.5.2
Resolver
Resolver
4-
][Funktion_Geber_Resolver_protego_D
Functions:
The resolver determines the absolute position of the rotor to the stator
within a revolution and signals this information to the servo amplifier.
Resolvers are fitted as standard in Pilz rotary servo motors PMCtendo
AC.
It is possible to connect resolvers from 2 to 36-poles.
Setting:
Feedback type FBTYPE = 0
4.3.5.3
SinCos encoder
SinCos encoder
4-
][Funktion_Geber_SinCos_protego_D
SinCos encoder with HIPERFACE interface (X1)
Functions:
SinCos encoder with HIPERFACE interface connected as a primary
feedback system
Single-turn: resolution of 32768 steps per revolution
Multi-turn: resolution of 4096 revolutions, each with 32768 steps
Programmable position value
Process data channel in real-time
Suitable as feedback for drive tasks requiring high precision position-
ing or extremely good synchronisation.
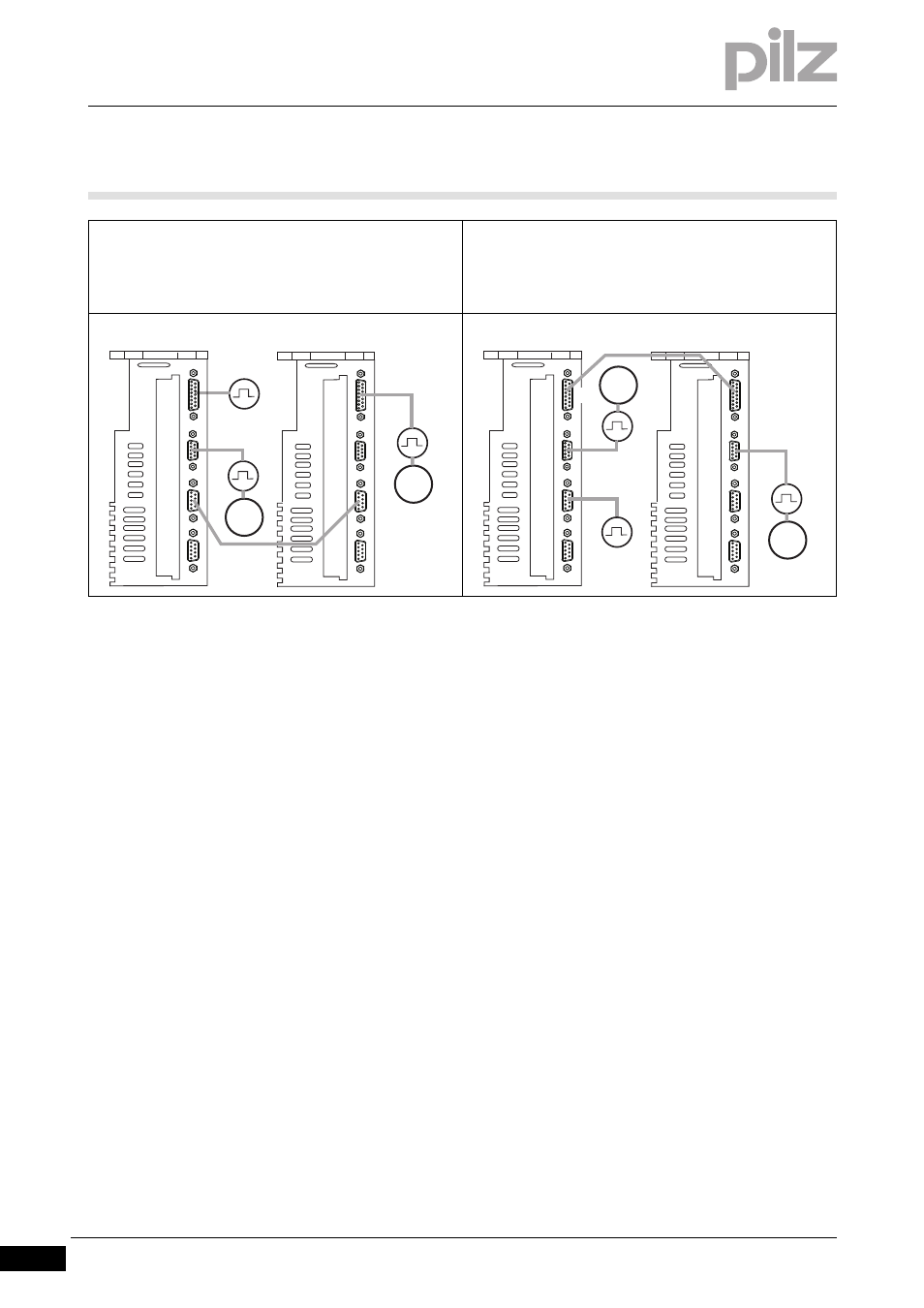
Master-Slave mode
X1 Master: External encoder (e.g. incremental encoder)
X1 Slave: Motor encoder (e.g. SinCos encoder)
X2 Master: Motor encoder (resolver)
X5 Master, Slave: Master-Slave connection
Master-Slave mode
X1 Master, Slave: Master-Slave connection
X2 Master: Motor encoder (resolver)
X2 Slave: Motor encoder (resolver)
X5 Master: External encoder (e.g. incremental encoder)
X1
FBTYPE
M
X2
Master
ENCMODE
Slave
GEARMODE
FBTYPE
M
X1
EXTPOS
X5
X5
X2
M
X2
Master
ENCMODE
Slave
GEARMODE
FBTYPE
M
EXTPOS
X5
X1
X1
FBTYPE