Festo Электромотор MTR-DCI User Manual
Page 268
B. Reference – Festo DeviceNet and FHPP
B-46
Festo P.BE-MTR-DCI-DN-EN en 1209a
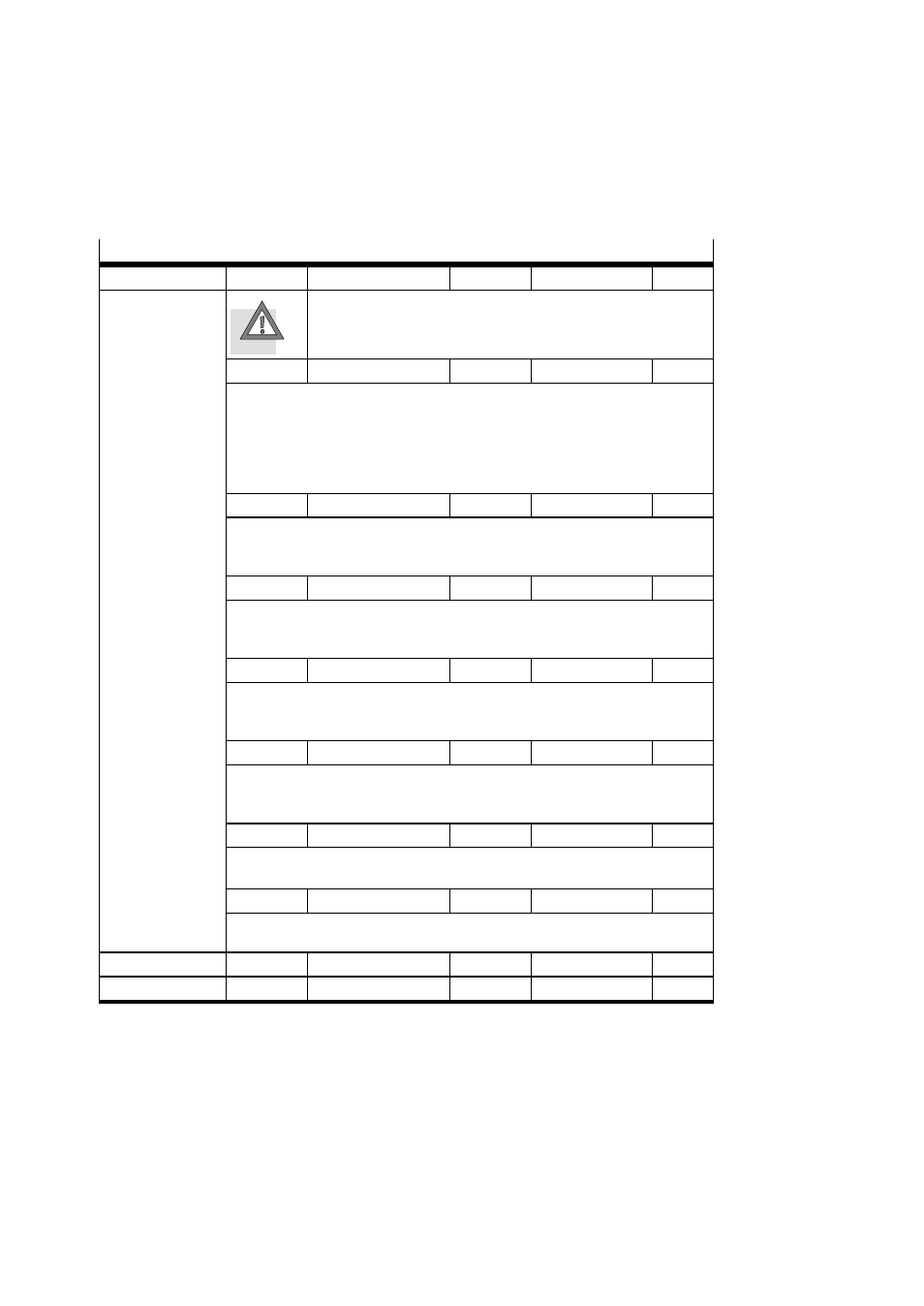
Position Control Parameter Set
FHPP
1024
18...23, 32
Array
uint16
rw
Description
Control parameters.
Modification is only permitted for service purposes.
If necessary consult Festo.
Gain Position 1024
18 (CI: 12h)
rw
Gain for position controller.
Value range:
MTR-DCI-32:1...100;
MTR-DCI-42/52/62: 1...200
Default:
MTR-DCI-32:20;
MTR-DCI-42:15;
MTR-DCI-52:10;
MTR-DCI-62:8
Gain Velocity 1024
19 (CI: 13h)
rw
Gain for speed controller.
Value range: MTR-DCI-32: 1...3000; MTR-DCI-42/52/62: 1...700
Default: MTR-DCI-32: 2800; MTR-DCI-42/52: 600; MTR-DCI-62: 500
I-Fraction Velocity 1024
20 (CI: 14h)
rw
Integral term for speed controller.
Value range: 1...600
Default: MTR-DCI-32: 80; MTR-DCI-42/52/62: 340
Gain Current 1024
21 (CI: 15h)
rw
Gain for current controller
Value range: MTR-DCI-32: 1...1000; MTR-DCI-42/52/62: 1...800
Default: MTR-DCI-32: 110; MTR-DCI-42/52/62: 150
I Fraction
1024
22 (CI:16h)
rw
Integral term for current regulator
Value range: MTR-DCI-32/42/52: 0...1000
Default: MTR-DCI-32: 90; MTR-DCI-42: 420; MTR-DCI-52: 350
Gain Velocity
Trajectory
1024
23 (CI: 17h)
rw
Gain for speed controller – trajectory generator.
Value range: 1...2. Default: 1
Save Position 1024
32 (CI: 20h)
rw
Saves current position in the EEPROM when power is switched off.
Fixed = 240 (0x00F0): current position is not saved at Power-Off.
CI
60FBh
12h...17h, 20h
Array
uint16
rw
DeviceNet
6Bh
01h
22h...28h
uint16
rw