B.2.14 project data – direct mode: (force mode) – Festo Электромотор MTR-DCI User Manual
Page 259
B. Reference – Festo DeviceNet and FHPP
B-37
Festo P.BE-MTR-DCI-DN-EN en 1209a
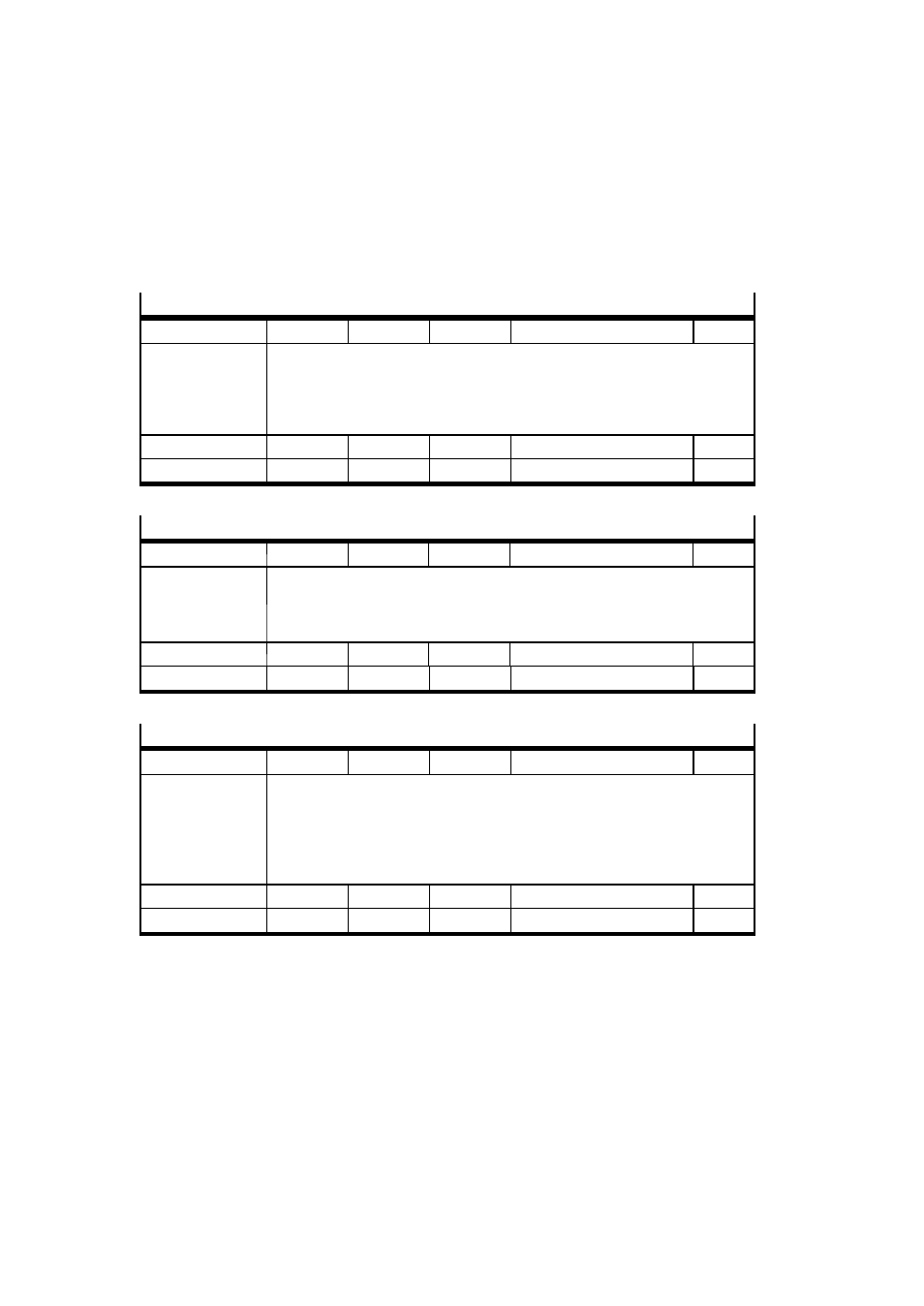
B.2.14 Project data – Direct mode: (Force mode)
Force Target Window
FHPP
552
–
–
uint16
rw
Description
The amount by which the actual force (or actual torque) may deviate from the
nominal force (nominal torque) and still be regarded as being within the target
window. The width of the window is therefore twice the value transferred, with
the nominal force in the centre of the window. The value is given in 1/1000 of
the nominal torque (6076h / PNU 509). Value range: 0...65535. Default: 100.
CI
60F6h
03h
–
uint16
rw
DeviceNet
69h
01h
29h
uint32
rw
Damping Time
FHPP
553
–
–
uint16
rw
Description
Once the actual force (or actual torque) has been in the target window
this amount of time, the “target reached” bit will be set in the status word
(= motion complete).
Value range: 0...30000 ms. Default: 100 ms.
CI
60F6h
04h
–
uint16
rw
DeviceNet
69h
01h
35h
uint16
rw
Speed Limit
FHPP
554
–
–
uint32
rw
Maximum permitted speed when Force mode is active. In this way the user can
ensure that, if Force mode is activated by mistake (e. g. when workpiece is
missing), the axis will not undergo uncontrolled acceleration and travel at high
speed against a stop. This parameter is evaluated in all controller modes in
which the position controller is
not active when in the “operation enabled”
state. Value range: 1...4.294.967.295 inc/s
CI
60F6h
02h
–
uint32
rw
DeviceNet
69h
01h
36h
uint32
rw