Festo Электромотор MTR-DCI User Manual
Page 135
5. Commissioning
5-37
Festo P.BE-MTR-DCI-DN-EN en 1209a
CPOS
Control byte 2 (CPOS) controls the positioning sequences as
soon as the drive is enabled.
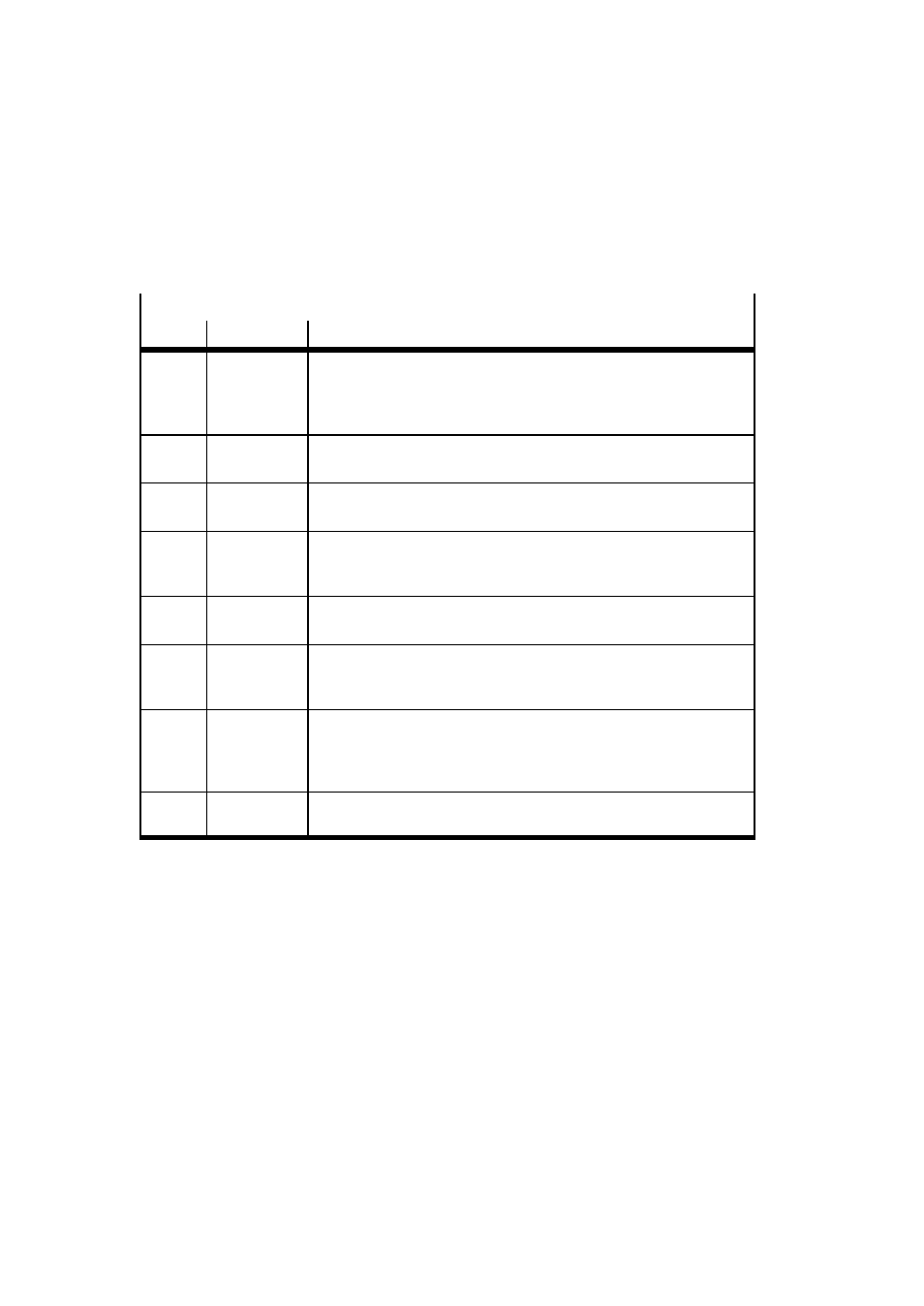
Control byte 2 (CPOS) – Record selection and direct task
Bit
EN
Description
B0
HALT
Halt
= 1: “Halt” is not active.
= 0: “Halt” activated (braking ramp + do not cancel positioning task).
The axis stops with a defined braking ramp; the positioning task
remains active (the remaining positioning can be deleted with B6).
B1
START
Start Posi-
tioning Task
The current nominal values will be transferred and positioning started
(record 0 = homing) by means of a
rising edge.
B2
HOM
Start
Homing
Homing with the defined parameters is started by means of a
rising
edge.
B3
JOGP
Jog positive
The drive moves at the specified speed or rotational speed towards
larger actual values, while the bit is set. The movement begins with the
rising edge and ends with the falling edge.
B4
JOGN
Jog negative
The drive moves at the pre-set speed (rotation) towards lower actual
values; see bit 3.
B5
TEACH
Teach actual
value
At a
falling edge the current actual position is imported into the setpoint
register of the current addressed positioning set; see section 5.6.3.
The Teach target is defined with PNU 520.
B6
CLEAR
Clear
remaining
positioning
path
In the “Halt” state a
rising edge causes the positioning task to be
cleared and a transition to the “Ready” state
B7
–
–
Reserved
: =0