Commissioning 5-54, Step/ description i data o data step/ description – Festo Электромотор MTR-DCI User Manual
Page 152
5. Commissioning
5-54
Festo P.BE-MTR-DCI-DN-EN en 1209a
Step/
Description
I data
O data
Step/
Description
B0
B1
B2
B3
B4
B5
B6
B7
Byte
B0
B1
B2
B3
B4
B5
B6
B7
Byte
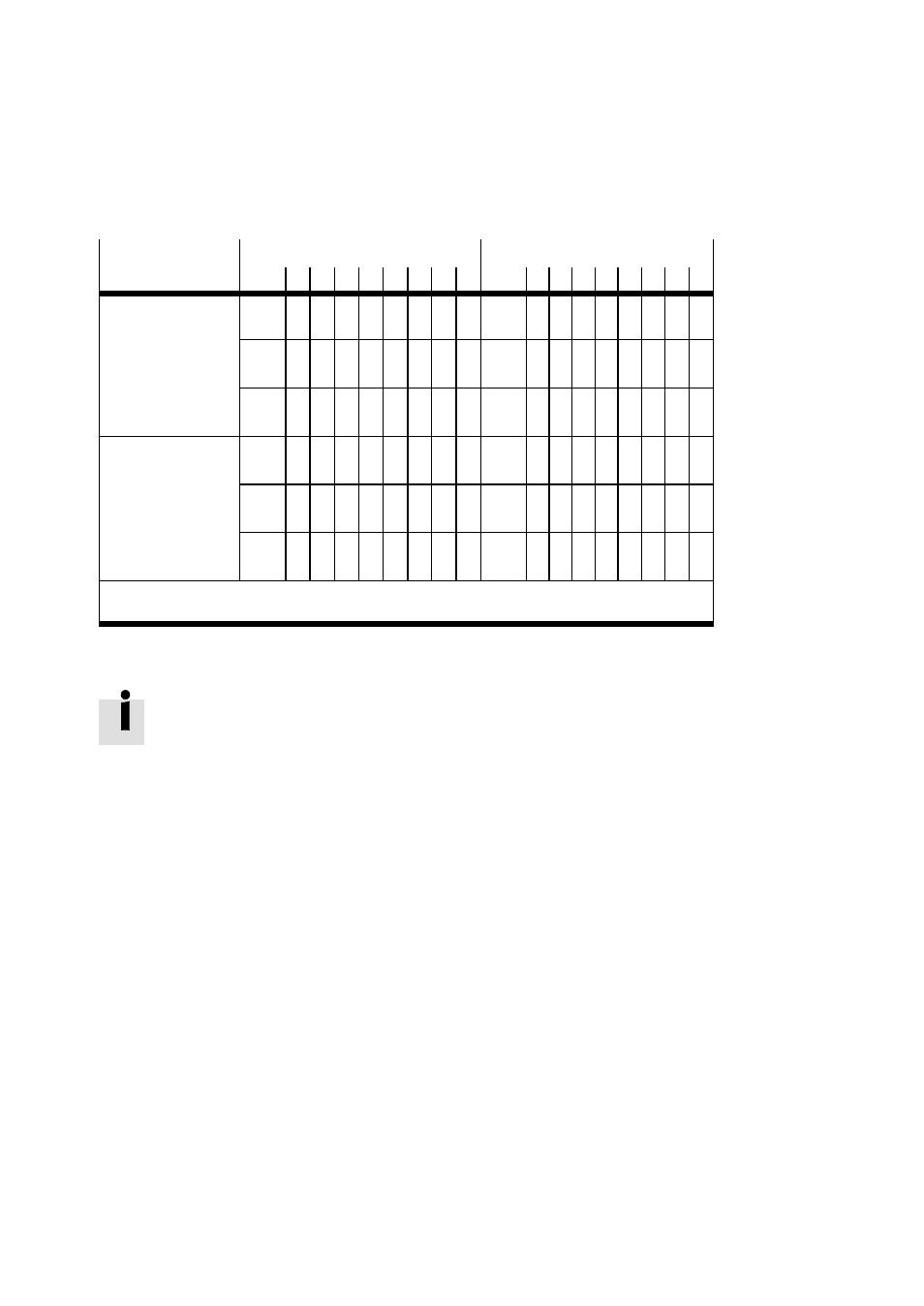
7.6 Positioning task
interrupted (stroke
limit or software end
position reached)
Byte 1
OPM2 OPM1
LOCK
–
RESET BRAKE STOP ENABL
Byte 1
OPM2 OPM1 LOCK
24VL
FAULT WARN OPEN ENABL
CCON 0
1
x
x
0
x
1
1
SCON 0
1
0
1
0
0
1
1
Byte 2
–
CLEAR TEACH JOGN
JOGP
HOM
START
HALT
Byte 2
REF
STILL
DEV
MOV TEACH
MC
ACK
HALT
CPOS x
0
0
0
0
0
x
1
SPOS 1
0
0
0
0
1
x
1
Byte 3
FUNC
FAST
XUM
–
CONT COM2 COM1
ABS
Byte 3
FUNC
FAST
XUM
VUM
CONT COM2 COM1
ABS
CDIR
0
0
S
x
0
0
1
0
SDIR
0
0
1
0
0
0
0
0
7.7 End positioning
task (e. g. with STOP)
Byte 1
OPM2 OPM1
LOCK
–
RESET BRAKE STOP ENABL
Byte 1
OPM2 OPM1 LOCK
24VL
FAULT WARN OPEN ENABL
CCON 0
1
x
x
0
x
0
1
SCON 0
1
0
1
0
0
0
1
Byte 2
–
CLEAR TEACH JOGN
JOGP
HOM
START
HALT
Byte 2
REF
STILL
DEV
MOV TEACH
MC
ACK
HALT
CPOS x
0
0
0
0
0
x
1
SPOS 1
0
0
0
0
1
x
1
Byte 3
FUNC
FAST
XUM
–
CONT COM2 COM1
ABS
Byte 3
FUNC
FAST
XUM
VUM
CONT COM2 COM1
ABS
CDIR
0
0
S
x
0
0
1
0
SDIR
0
0
0
0
0
0
0
0
0: 0 signal
1: 1 signal;
x: not relevant (any);
F: Edge positive
S: Path limitation (stroke limit): 0 = stroke limit active, 1 = stroke limit not active
Tab. 5/15: I/O data Direct task: Force mode
If there are faults during Force mode:
see example 3, table 5/13 Fault handling.