Pausing of operation – IAI America XSEL-KE User Manual
Page 312
297
Appendix
15. Pausing of Operation
Description
Use the declaration command HOLD to pause the moving axis via an external input.
How to Use
When a HOLD command is declared in the program, the moving axis can be interrupted and paused
(decelerated to a stop). While the HOLD signal is input, the axes moving under all move commands in the
same program are paused (decelerated to a stop).
Example of Use
Application
Not only an input port, but also a global flag can be specified for operand 1 in the HOLD command.
By using a global flag, you can also pause the moving axis from other program.
If operand 2 is used, you can select desired input signal and stop patterns.
0 = Contact a (Deceleration to stop)
Same as when operand 2 is not specified
1 = Contact b (Deceleration to stop)
2 = Contact b (Deceleration to stop, followed by servo OFF
Drive power not turned OFF)
Note
If the actuator is paused while returning to its home, when the operation is resumed the actuator will
perform the return-to-home sequence from the beginning.
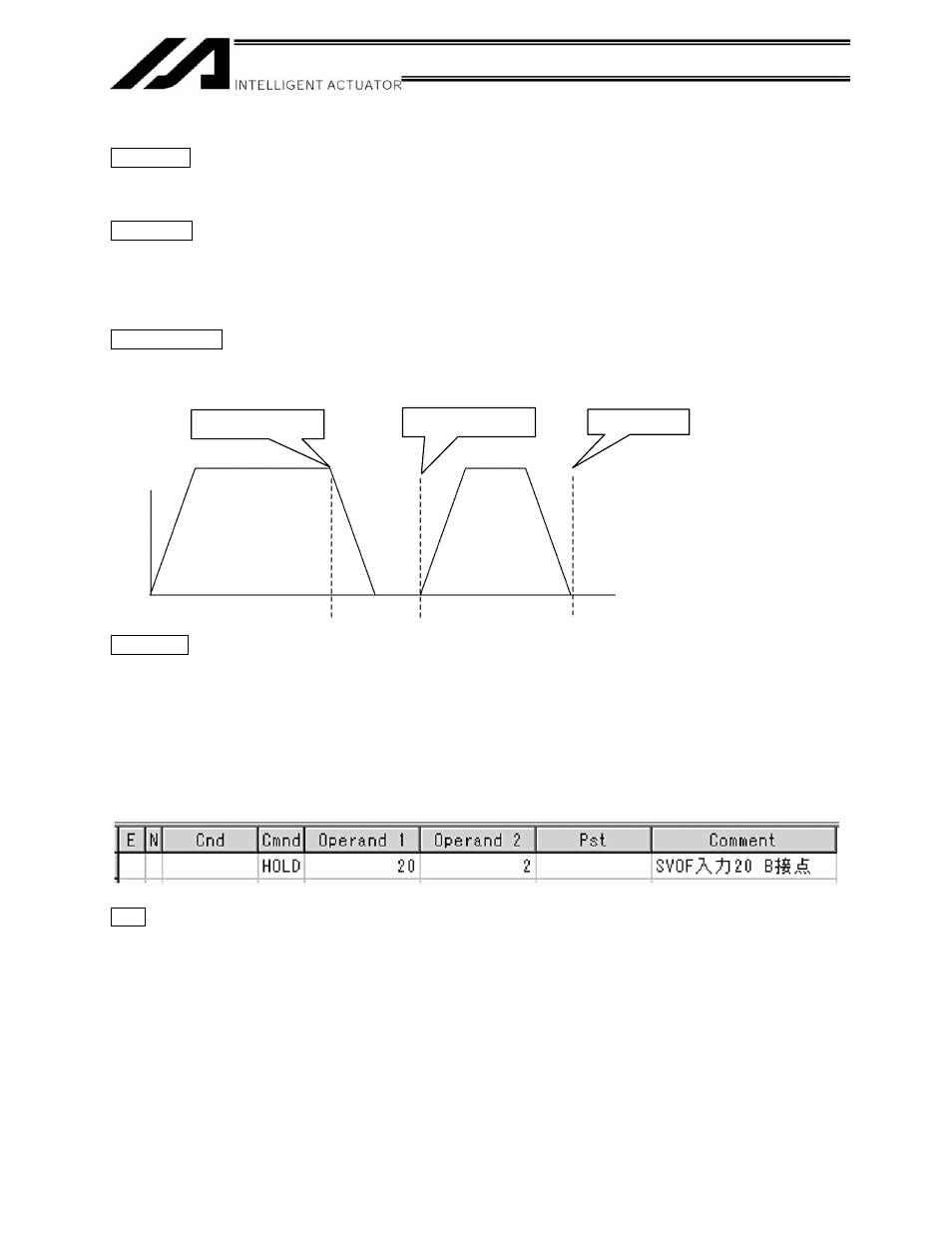
Hold 20
Declaration to pause the axis when general-purpose input 20 is input
Input port 20 ON
Input port 20 OFF
Axis stopped
Remaining
operation
Time
Speed