IAI America XSEL-KE User Manual
Page 168
153
Part 4 Commands
* The following tasks apply to all used axes in the case of a MOVP command operation
in quick return mode 2 (they apply to all used axes even when specified for an
individual axis or axes):
All stop processing including processing due to a STOP command
Speed change with a CHVL command
* An attempt to switch to quick return mode 1 directly from quick return mode 2 will
JHQHUDWHDQ³(UURU1R%4XLFNUHWXUQPRGHHUURU´
* Software versions supporting quick return mode 2
&RQWUROOHUPDLQDSSOLFDWLRQ 9HUVLRQRU later (excluding the flash ROM 8-Mbit
version)
3&VRIWZDUH
9HUVLRQRUODWHU
7HDFKLQJSHQGDQW
,$7;'YHUVLRQRUODWHUVFKHGXOHGWREHUHOHDVHG
LQHDUO\'HFHPEHU
6(/7'YHUVLRQRUODWHUVFKHGXOHGWREHUHOHDVHG
LQHDUO\'HFHPEHU
>@ 4XLFNUHWXUQPRGH5HWXUQDIWHUQHDUGHWHFWLRQ WDUJHWSRVLWLRQFKDQJHPRGH
x ,QWKHFDVHRIH[HFXWLRQRID0293029/RU3$7+ODVWSRVLWLRQPRYHPHQW
FRPPDQGDQHDUGHWHFWLRQLVPDGHZKHQWKHQHDUEDQGVHWE\D1%1'FRPPDQGLV
reached during steady-state positioning of all used axes according to the
aforementioned command (or when the positioning band is reached after all command
SXOVHVKDYHEHHQRXWSXWXSRQZKLFKWKHDFWXDWRUUHWXUQVIURPWKHFRPSOHWHG
FRPPDQGYLDTXLFNUHWXUQDQGH[HFXWHVWKH6(/FRPPDQGLQWKHQH[WVWHS
Set this mode if you want to perform other processing during positioning by combining
1%1'3(1'FRPPDQGVRUFKDQJHWKHWDUJHWSRVLWLRQZLWKRXWVWRSSLQJ
x ,ID0293029/RU3$7+FRPPDQGLVH[ecuted again during the quick return
PRYHPHQWLQTXLFNUHWXUQPRGHWKHWDUJHWSRVLWLRQZLOOEHFKDQJHGZLWKRXWWKH
actuator stopping (the actuator will start decelerating to a stop to cancel the movement
WRWKHSUHYLRXVWDUJHWSRVLWLRQDQGWKHQVWDUWPRYLQJWRWKHQHZWDUJHWSRVLWLRQ
>([DPSOH@
:
4571
6HWTXLFNUHWXUQPRGH
1%1'
6HWWKHQHDUEDQGIRUD[HVWRWRPP
029/
0RYHWRSRVLWLRQD[HV
7KHSURJUDPSURFHHGVWRWKHQH[WVWHSDSSUR[
PPEHIRUHHDFKD[LVUHDFKHVWKHWDUJHW
:721
:DLWIRUSHUPLVVLRQWRPRYHWRSRVLWLRQ
029/
0RYHWRSRVLWLRQD[LV
3(1'
:DLWIRUWKHRSHUDWLRQRIDOOXVHGD[HVWRHQG
4571
6HWTXLFNUHWXUQPRGH
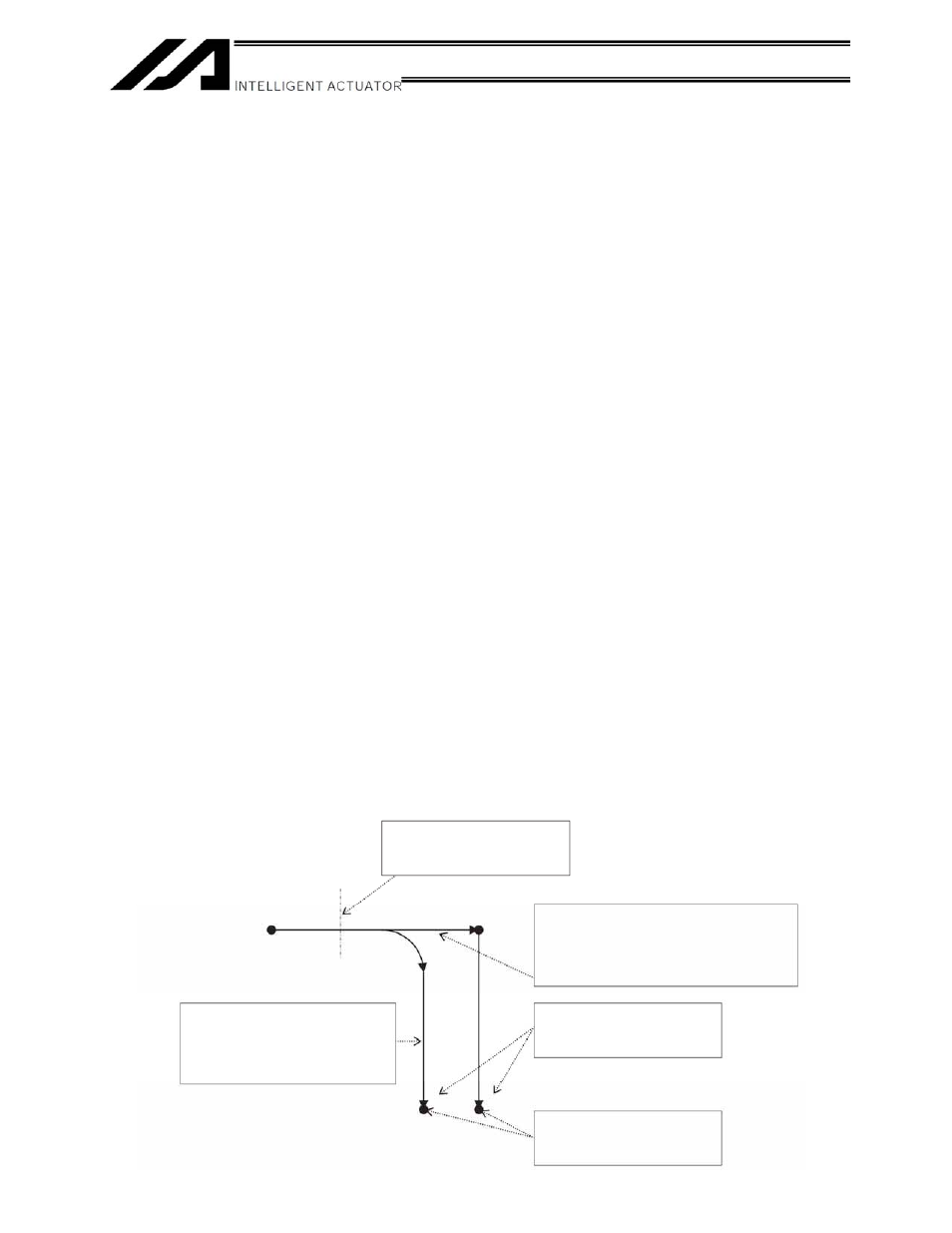
1HDUGHWHFWLRQDSSUR[
mm before each axis reaches
the target
o1H[WVWHS
Start point
3RVLWLRQ1R
3DWKZKHQJOREDOIODJ
WXUQV21EHIRUHSRVLWLRQLV
reached
2XWSXW2))
3DWKZKHQJOREDOIODJWXUQV
21DIWHUSRVLWLRQLVUHDFKHG
2XWSXW7XUQV21QHDUWKH
WDUJHWSRVLWLRQ
2XWSXW7XUQV21
QHDUWKHWDUJHWSRVLWLRQ
2XWSXW7XUQV21
when the positioning
FRPSOHWHVVXFFHVVIXOO\
3RVLWLRQ1R