IAI America PCON-CFA User Manual
Page 255
4. SCON-CA
249
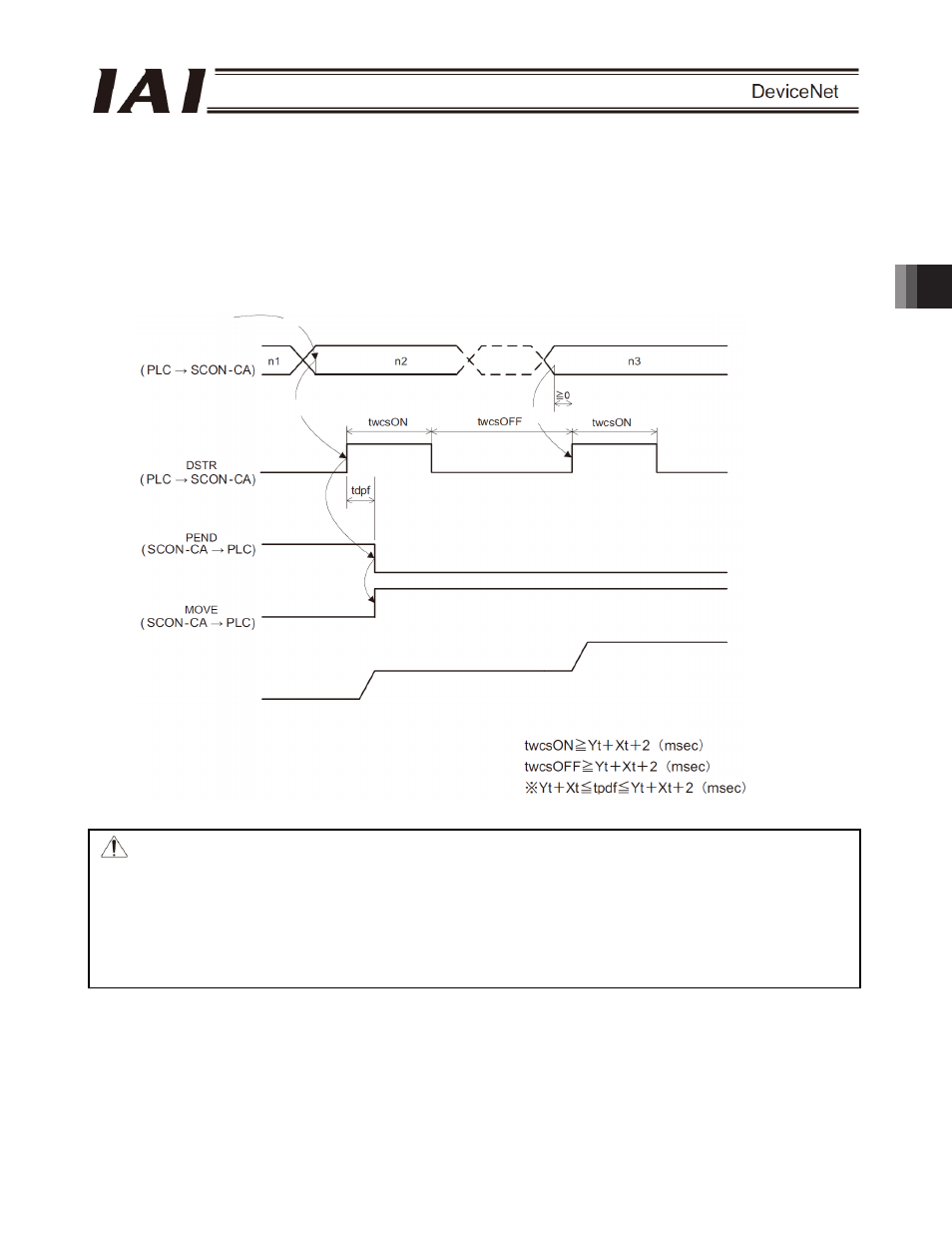
(4) Data change during movement
In the half direct mode 1 to 3 and full direct mode, the values of target position data, acceleration/deceleration
data, speed data, positioning band and push-current limiting value set by the PLC can be changed while the
actuator is moving. After a desired data has been changed, turn the positioning command (DSTR) signal “ON” for
tdpf or longer.
After the DSTR is turned “OFF,” wait for at least “twcsON + twcsOFF” before DSTR is turned “ON” again.
An example of changing the speed or acceleration/deceleration is given below.
Caution:
1. If the speed is not yet set or set to “0,” the actuator will remain standstill and no alarm will
generate.
2. If the speed is changed to “0” while the actuator is moving, the actuator will decelerate to
a stop and no alarm will generate.
3. Even when the acceleration/deceleration or speed data alone is changed while the
actuator is moving, the target position data must also be set.
4. Even when the target position alone is changed while the actuator is moving, the
acceleration/deceleration and speed data must also be set.
Set value of speed or
acceleration/deceleration
[1]
[2] [3]
Actuator speed
Speed n2
Speed n3