Scon-ca, 1 operation modes and functions – IAI America PCON-CFA User Manual
Page 162
4. SCON-CA
156
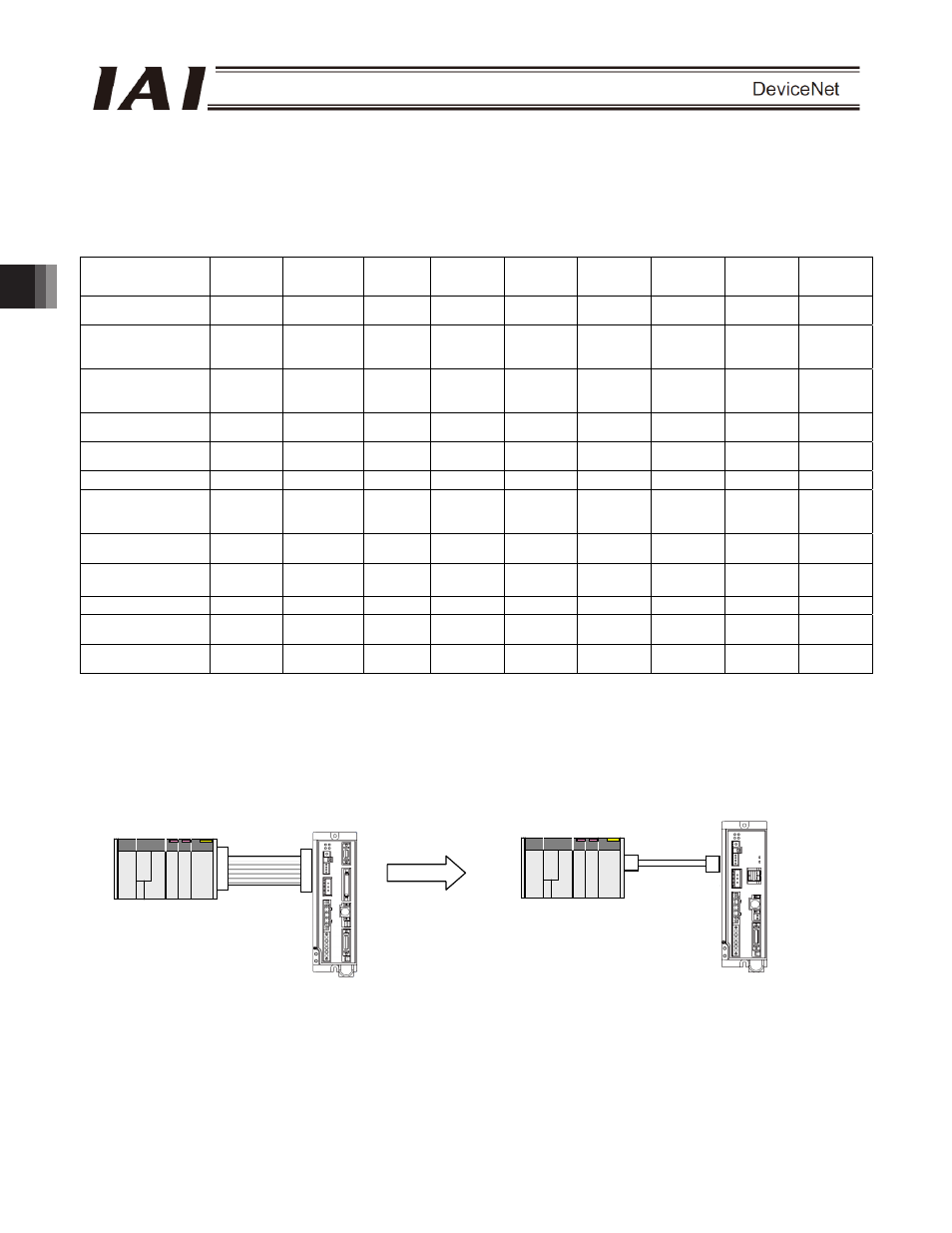
PLC
PLC
Flat cable
Communication
cable
4. SCON-CA
4.1
Operation Modes and Functions
SCON-CA controllers supporting DeviceNet can be operated in a desired operation mode selected from the
following nine modes.
Key function
Remote I/O
mode
Position/simple
direct mode
Half direct
mode
Full direct
mode
Remote I/O
mode 2
Position/
simple direct
mode 2
Half direct
mode 2
Remote I/O
mode 3
Half direct
mode 3
Number of occupied
channels
1CH 4CH 8CH
16CH 6CH 4CH 8CH 6CH 8CH
Operation by
position data
specification
x
{
(*1)
{
{
x
{
(*1)
{
x
{
Direct
speed/acceleration
specification
x
x
{
{
x
x
{
x
{
Push-motion
operation
{
{
{
{
{
{
{
{
{
Current position
read
x
{
{
{
{
{
{
{
{
Current speed read
x
x
{
{
x
x
{
x
{
Operation by
position number
specification
{
{
x
x
{
{
x
{
x
Completed position
number read
{
{
x
x
{
{
x
{
x
Maximum position
table size
512 768
Not
used
Not used
512
768
Not used
512
Not used
Force control
U(*2)
x
x
{
U(*2)
{
{
{
x
Vibration damping
control
{
{
x
{
{
{
x
{
{
Servo gain
switching
{
{
{
{
{
{
x
{
{
(*1) The actuator is operated by specifying all position data, other than positions, using position numbers.
(*2) These functions can be used when the PIO pattern is set to 6 or 7.
[1] Remote I/O mode: In this mode, the actuator is operated by PIOs (24-V I/Os) via DeviceNet communication.
Number of occupied channels: 1 channel
SCON-CA not supporting
DeviceNet
PIO connection
SCON-CA supporting
DeviceNet
DeviceNet connection