IAI America PCON-CFA User Manual
Page 165
4. SCON-CA
159
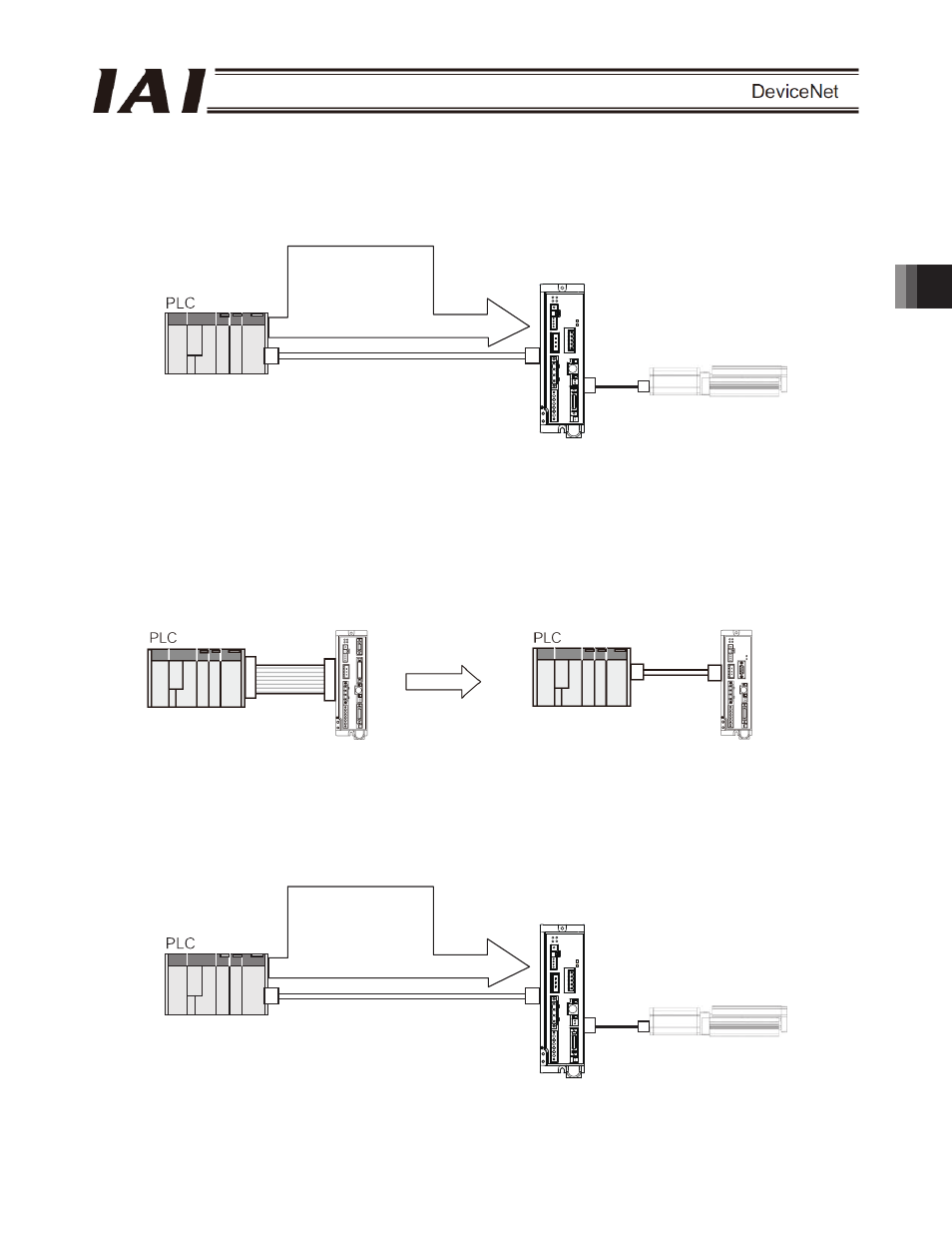
Flat cable
Communication
cable
[7] Half direct mode 2: In this mode, the actuator is operated by specifying the speed, acceleration/deceleration
and push current, in addition to the target position, directly as values.
Unlike in mode [3], command current cannot be read in this mode. However, load cell
data can be read instead. This mode also supports force control.
Number of occupied channels: 8CH
2:=&
:68&
1=8=797&
7
'77
87
&
,
;7&!
1/'==:
)>7/
'7
[8] Remote I/O mode 3: In this mode, the actuator is operated by DeviceNet instead of PIO (24 V I/O).
This mode provides all functions available in mode [1], plus the current position read
function and load cell data read function.
Number of occupied channels: 6CH
[9] Half direct mode 3: In this mode, the actuator is operated by specifying the speed, acceleration/deceleration
and push current, in addition to the target position, directly as values.
In this mode, the vibration damping control function is supported instead of the jog
function available in mode [3].
Number of occupied channels: 8CH
2:=&
:68&
1=8=797&
7
'77
87
&
,
;7&!
1/'==:
)>7/
'7
SCON-CA not supporting
DeviceNet
PIO connection
SCON-CA supporting
DeviceNet
DeviceNet connection